
Una mirada a la precisión de los convertidores analógico-digitales de alta velocidad
Los convertidores analógico-digitales (también conocidos como ADC) se utilizan en muchas aplicaciones, incluidos los sistemas de medición que necesitan procesar señales de transductores analógicos, como un sistema de adquisición de datos para medir la presión, el caudal, la velocidad y la temperatura, por nombrar algunos. Normalmente estas señales son firmas en el dominio del tiempo en forma de pulso o función escalonada.
En cualquier diseño es importante conocer la precisión global del sistema para este tipo de aplicaciones, especialmente los sistemas que necesitan cuantificar sensibilidades o cambios muy pequeños en una forma de onda. El caso ideal es que por cada voltio aplicado a la entrada de una cadena de señales, el ADC represente digitalmente una salida de un voltio. Sin embargo, este no es el caso. Todos los convertidores, y las cadenas de señales, tienen una cantidad finita de error asociada.
En este artículo se describen los errores asociados al propio convertidor analógico-digital. También revela cómo se acumulan las imprecisiones en el convertidor y causan estos errores. Esto desempeña un papel importante a la hora de entender cómo especificar correctamente un ADC cuando se definen los parámetros del sistema para un nuevo diseño, donde la precisión de la medición es primordial. Por último, se discutirá un sencillo análisis de errores para ayudar a seleccionar el convertidor adecuado para el diseño.
Inexactitud del CAD
En cualquier cadena de señales, el convertidor es la base del sistema. Cualquier ADC seleccionado para el diseño determina la precisión global del sistema. En otras palabras, la precisión del sistema no puede ser mejor que el tamaño del bit menos significativo (LSB) del convertidor. Para ilustrar este punto, merece la pena repasar un breve tutorial sobre las imprecisiones del CAD.
En primer lugar, ten en cuenta que como los ADC no son ideales y no tienen una resolución infinita, sólo pueden mostrar un número finito de representaciones en su salida. El número de representaciones viene determinado por la entrada de fondo de escala del convertidor dividida por 2N donde N es el número de bits idealmente disponibles para el convertidor.
Por ejemplo, si se elige un ADC de 12 bits, puede tener 4096 representaciones digitales en su salida para representar cualquier señal aplicada a la entrada del convertidor. Estas representaciones tienen un cierto grado de error finito. Por tanto, si el ADC de 12 bits tiene una entrada de escala completa (VFS) de 10 V p-p, tendrá un tamaño de LSB de 2,44 mV p-p y una precisión de ±1,22 mV idealmente.
Ecuación 1
Pero, en realidad, los CAD no son ideales. Hay una cierta cantidad finita de ruido
![]()
dentro del propio convertidor, incluso en CC. Recuerda que una resistencia de 1 kΩ equivale a 4 nV/√Hz en un ancho de banda de 1 Hz a 25 °C. Ten en cuenta que si miras la hoja de datos de un ADC de 12 bits, la SNR suele ser de ~70 dB a 72 dB. Sin embargo, un ADC de 12 bits debería tener 74 dB en el mundo ideal si se utiliza la siguiente ecuación:

Ecuación 2.
Por lo tanto, en el mundo real, no se alcanzará la resolución de 12 bits porque el propio convertidor lleva asociadas ciertas imprecisiones, como se muestra en la figura 2.
Estas imprecisiones o errores definen la eficacia del convertidor en la representación de la señal que finalmente se adquiere a lo largo de la cadena de señales. El error de desplazamiento se define como el valor analógico por el que la función de transferencia no pasa por cero. El error de ganancia es la diferencia del valor del fondo de escala entre la función de transferencia ideal y la real cuando el error de desplazamiento es cero. El error de linealidad o no linealidad, como se suele llamar, es la desviación de la línea recta trazada entre el cero y el fondo de escala, como se muestra en la figura 1.
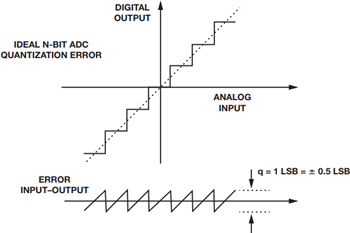
Figura 1: Error de cuantificación del CAD.
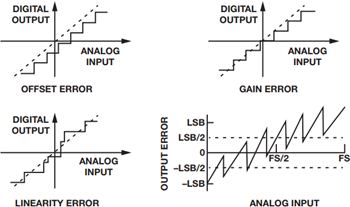
Figura 2. Imprecisiones del CAD.
Más información sobre las inexactitudes del CAD
Ahora que se han definido y comprendido los errores más básicos de los CAD, es útil describir las diferencias entre estos errores. En general, la mayoría de los ADC presentan errores de desplazamiento y ganancia tan pequeños que pueden ignorarse o ajustarse (anularse) mediante circuitos analógicos externos, o corregirse digitalmente. Sin embargo, otros errores, como la linealidad, la cuantificación y el tempo, no pueden ajustarse ni eliminarse fácilmente.
La linealidad del convertidor A/D es tan buena como el propio convertidor, que depende de la arquitectura y de la variación del proceso. Hay formas de corregir este problema, pero son caras. El diseñador tiene dos opciones: comprar un convertidor mejor y más caro o corregir la linealidad digitalmente. La corrección digital también puede ser cara. Esto significa que la especificación de un DSP o FPGA puede requerir más recursos, ya que la linealidad se desplazará con las variaciones de temperatura y proceso. Según la frecuencia de muestreo, la frecuencia intermedia y la resolución, la corrección digital puede requerir una amplia caracterización y tablas de consulta para corregir o ajustar el rendimiento del ADC sobre la marcha.
Hay dos tipos de errores de linealidad: la no linealidad diferencial y la linealidad integral, comúnmente denominadas DNL e INL, respectivamente. El DNL se define como cualquier error o desviación de su valor ideal. En otras palabras, es la desviación de la diferencia analógica entre dos códigos adyacentes respecto al valor del código ideal de VFS/2N. Piensa en ello en términos de rendimiento de la SNR del ADC. A medida que aumenta la variación del código, disminuye el número de transiciones. Este error está limitado a ±0,5 LSB sobre la temperatura para garantizar que no se pierda ningún código.
El INL se define como la desviación de la curvatura respecto a la aproximación ideal de la línea recta entre el cero y el fondo de escala. El INL determina en gran medida el rendimiento de la SFDR del ADC. La forma de la desviación global del INL puede determinar el rendimiento armónico dominante. Por ejemplo, un arco en la curva INL dará sistemáticamente peores armónicos de orden par y un arco en forma de S en la curva INL dará normalmente armónicos de orden impar. Este error es de naturaleza dependiente de la frecuencia y no está relacionado con este tipo de análisis de errores.
Aunque sea posible un cero en los errores estáticos de desplazamiento y ganancia, los coeficientes de temperatura relacionados con los errores de desplazamiento y ganancia siempre existirán.
Por ejemplo, un ADC de 12 bits con un error de ganancia de 10 ppm o FSR/°C = 0,001%/°C.
1 LSB en un sistema de 12 bits = 1 parte en 4096, es decir, aproximadamente el 0,024%.
Así, con un ∆ de 125°C (de -40°C a +85°C), se obtiene un error de ganancia tempco de ±2,5 LSB, es decir 0.001% × 125 = 0.125%.
En el que 0.125/0.024 = 5.1 o ±2.55 LSBs.
Para el desplazamiento tempco un error de desplazamiento de 5 ppm o FSR/°C = 0,0005%/°C.
Esto daría un error de ±1,3 LSB para el desplazamiento del tempco, o 0.0005% × 125 = 0.0625. En el que 0.0625/0.024 = 2.6 o ±1,3 LSBs.
Análisis de errores del CAD
Otras fuentes de error que también pueden influir en el rendimiento del convertidor son la CMRR, la fluctuación del reloj, el ruido inherente a la placa y el acoplamiento, por nombrar algunas. Todos estos errores definen, en última instancia, la eficacia del CAD a la hora de representar una señal, y generalmente se producen con mayor eficacia en el dominio de la frecuencia.
Desde el punto de vista del dominio del tiempo, los cinco errores siguientes son necesarios para dictar la precisión global del convertidor:
- Precisión relativa, DNL, que se ha definido como ±0,5 LSBs
- Precisión relativa tempco y DNL tempco, que suele incluirse en la especificación de la precisión relativa en la ficha técnica.
- Error de ganancia de tempco, que era de ±2,5 LSB (del ejemplo anterior)
- El error de tempo, que era de ±1,3 LSB (del ejemplo anterior)
- La sensibilidad de la fuente de alimentación, que suele expresarse como la PSRR (relación de rechazo de la fuente de alimentación) a baja frecuencia en la primera zona de Nyquist. Esto puede expresarse normalmente como 60 dB o ±2 LSBs para un ADC de 12 bits.
Tomando simplemente la raíz cuadrada (RSS), todas estas fuentes de error = ±3,5 LSBs de error total del convertidor. Esto puede parecer excesivamente pesimista. Sin embargo, una tolerancia estadística puede ser demasiado optimista, o la suma total de los errores dividida por el número de errores, es decir (0,5 + 2,5 + 1,3 + 2)/4 = ±1,58 LSBs. Encontrar la tolerancia real del ADC debería estar en algún lugar entre estos dos pensamientos o métodos.
Por lo tanto, al añadir errores de precisión en el convertidor, o en cualquier análisis de sistemas de precisión, el diseñador debe utilizar un enfoque de fuentes de error ponderadas, y luego RSS estas fuentes de error juntas. Esto proporcionará el mejor método para determinar el error global del CAD. Por lo tanto, la precisión relativa de ±0,5 LSBs debe permanecer en el 100%. Sin embargo, el error de ganancia temporal de ±2,5 LSBs debe ser el 66% del error total, es decir 2.5/(0.5 + 1.3 + 2) × 100. El error de desplazamiento temporal de ±1,3 LSB correspondería al 26% del error total, es decir 1.3/(0.5 + 2.5 + 2) × 100. El error de sensibilidad de la fuente de alimentación de ±2 LSB sería el 47% del error total, es decir 2/(0.5 + 1.3 + 2.5) × 100. Sumando estos errores RSS o ponderados por la raíz cuadrada
√((0.5 × 1)2 + (2.5 × 0.66)2 + (1.3 × 0.26)2 + (2 × 0.47)2)da un error total de ±2,0 LSB, que da algo más realista, entre los resultados de los métodos optimista y pesimista anteriores.
Precisión del ancho de banda del ADC
El ADC también tiene una precisión de tiempo de asentamiento. Recuerda que el frontal interno de un convertidor debe tener un ancho de banda (BW) suficiente para muestrear la señal con precisión. De lo contrario, la acumulación de errores será mayor que la encontrada anteriormente.
En general, el frontal interno de un ADC debe asentarse en un medio período o ciclo de reloj de muestreo (0,5/Fs) para proporcionar una representación de entrada precisa de la señal analógica que se va a adquirir. Por lo tanto, para un ADC de 12 bits que muestre a 2,5 GSPS y un rango de entrada de escala completa de 1,3 V p-p, el ancho de banda de potencia total (FPBW) necesario puede derivarse de la siguiente ecuación transitoria:
![]()
Resuelve t :
![]()
Sub en τ = 1/(2 × π × FPBW), una constante de tiempo, y resuelve la FPBW :
![]()
Ahora dejemos t = 0,5/Fs, el tiempo necesario para que una muestra se estabilice, donde el periodo de muestreo es 1/Fs :

Esto dará el ancho de banda mínimo necesario para el frontal interno del convertidor analógico o FPBW. Es la cantidad de ancho de banda necesaria para que el frontal interno del convertidor se asiente con una precisión de 1 LSB y muestre la señal analógica adecuadamente. Para conseguir una precisión de 1 LSB en este tipo de ADC se necesitan varias constantes de tiempo.
Donde una constante de tiempo es igual a 24 ps o τ = 1/(2 × π × FPBW). Para conocer el número de constantes de tiempo necesarias para el rango de escala completa del ADC en tamaño LSB, tenemos que encontrar el % de error de escala completa, o %FS. O 1 LSB = FS/(2N)donde N = número de bits o 1.3 V p-p/(212) = 317 μV p-py %FS = (LSB/FS) × 100 = 0,0244.
Trazando el número de Euler, o eτes posible desarrollar un gráfico que muestre fácilmente el error relativo a medida que pasa cada constante de tiempo. Como se muestra en la Figura 3, se puede observar que el ejemplo de ADC de 12 bits tarda 8,4 constantes de tiempo en estabilizarse correctamente con una precisión de 1 LSB.
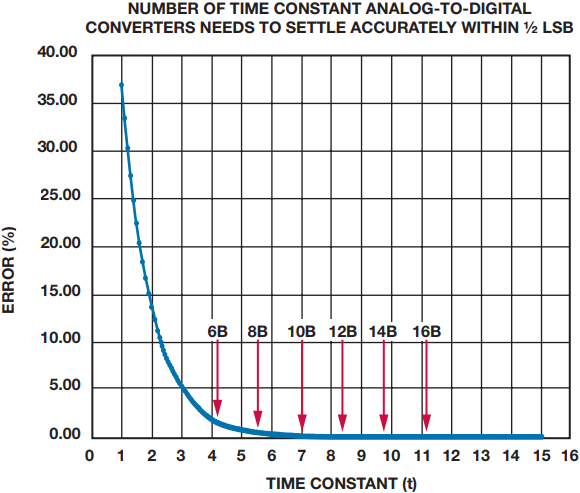
Figura 3: Precisión de la liquidación en función de las constantes de tiempo.
Esto permite al diseñador estimar la máxima frecuencia de entrada analógica, o BW de muestreo, que puede utilizar el convertidor y estabilizarse dentro de 1 LSB de error. Más allá de esto, el convertidor analógico no puede representar con precisión la señal. Esto se define simplemente como FMAX = 1/(τ × número de constantes temporales) o 1/(24 ps × 8,4) = 4,96 GHz.
Recuerda que éste es el mejor de los casos y que el supuesto es el de un modelo unipolar CAN frontal. No todos los convertidores prácticos se comportan así, pero es un buen punto de partida. Por ejemplo, el modelo descrito es válido hasta 12 bits, pero para 14/16 bits y más, hay que utilizar un modelo de segundo orden debido a esos efectos sutiles que pueden alargar el tiempo de asentamiento más allá de los modelos de primer orden previstos.
Nota rápida sobre el ancho de banda del ADC
Recuerda que el ancho de banda de potencia total de un ADC es diferente del ancho de banda utilizable del convertidor o del ancho de banda de muestreo, como se ha definido anteriormente. Esto puede considerarse análogo al ancho de banda de plena potencia (FPBW) de un amplificador operacional, donde la señal es más bien un triángulo y hay mucha distorsión en su(s) salida(s). El FPBW es el ancho de banda que el ADC necesita para adquirir las señales con precisión y para que el frontal interno se ajuste correctamente, (6,62 GHz como se muestra en el ejemplo anterior). Seleccionar una FI y utilizar el convertidor en esta región no es una buena idea, ya que los resultados de rendimiento variarán considerablemente en el sistema, en función de la resolución y de los índices de rendimiento indicados en la hoja de datos del convertidor, el ancho de banda de potencia total es mucho mayor que el ancho de banda de muestreo máximo del propio convertidor, como en ~5 GHz, el ejemplo mostrado anteriormente. El ancho de banda de la muestra es donde se centra el diseño. Todos los diseños deben evitar utilizar una parte o la totalidad de las porciones de frecuencia más altas del ancho de banda nominal de plena potencia, ya que ello supondría una disminución del rendimiento dinámico (SNR/SFDR) que podría variar considerablemente. Para determinar el ancho de banda de muestreo del ADC de alta velocidad, utiliza el ejemplo anterior, ya que a veces no se indica específicamente en la hoja de datos. En general, la hoja de datos ha especificado o incluso enumerado las frecuencias probadas en producción que garantizan el rendimiento proporcionado en el ancho de banda de muestra del convertidor. Sin embargo, en las generaciones más antiguas de ADC, estas frecuencias de prueba no siempre se indican hasta el FMAX como se define arriba en la hoja de datos. En el futuro, habrá que especificar, definir y probar mejor estos términos de ancho de banda en la industria.
Conclusión
Este documento debería haber proporcionado orientación sobre cómo examinar los errores de inexactitud estáticos generales del CAD y el error de inexactitud del CAD que implica el ancho de banda. También se ha dado una mejor comprensión de los errores del CAD y de cómo estos errores influyen en la cadena de señales. Recuerda que no todos los componentes son iguales, y esto es cierto tanto para los dispositivos activos como para los pasivos. Desarrollar hojas de cálculo que capturen todos estos errores es una forma fácil de conectar los diferentes componentes de la cadena de señales para hacer evaluaciones y compensaciones de componentes más rápidamente. Esto es especialmente cierto cuando se trata de hacer concesiones entre el coste, el tamaño y la potencia de los componentes y las diferencias en el rendimiento de la cadena de señales.
Ten en cuenta estos principios cuando diseñes tu próxima cadena de señales. Si lo solicitas, podemos enviarte un análisis en forma de hoja de cálculo con los ejemplos anteriores. No dudes en utilizarlo y adaptarlo para tu próximo diseño. Si tienes más preguntas, conéctate conmigo en el sitio web de Analog Devices EngineerZone®una comunidad de apoyo técnico en línea, en RReeder.
En la Parte 2: Exactitud de la cadena de señales analógicas se tratará más sobre cómo generar un análisis completo de la cadena de señales. Por último, recuerda que el simple hecho de aumentar el rendimiento o la resolución del ADC en la cadena de señales no aumentará la precisión de la medición. Si sigue habiendo la misma cantidad de ruido frontal, la precisión no mejorará. El ruido sólo se medirá de forma más granular y, al final, probablemente le costará más al jefe del diseñador.
Referencias
Nota de aplicación AN010, Rango de medición dinámico para los analizadores de señales LDS Dactron, 2003.
Bennett, William R. "Espectros de señal cuantificados" Revista técnica de Bell Systemvol. 27, 1948.
Bennett, William R. "Ruido en los sistemas PCM" Archivo de los Laboratorios Bellvol. 26, 1948.
Brannon, Brad. Nota de aplicación AN-410, Superar las no linealidades del convertidor con Dither. Analog Devices, 1995.
Gyorki, John R Manual de acondicionamiento de la señal y adquisición de datos en el PC. 3ª edición, 1-11.
Kester, Walt. "Conversión analógico-digital: serie de seminarios" Conversión analógica a digital, Analog Devices, 2004.
Precisión global = ENOB (número efectivo de bits), Traducción de datos.
Ruscak, Steve y Larry Singer. Uso de técnicas de histograma para medir el ruido del convertidor A/D Diálogo analógicovol. 29-2, 1995.
"Presupuestos de errores del sistema, precisión, resolución" Dataforth.
Titus, John. "Resolución y precisión: primos, no gemelos" Noticias de diseño, 2003.
Si quieres conocer otros artículos parecidos a Una mirada a la precisión de los convertidores analógico-digitales de alta velocidad puedes visitar la categoría Generalidades.
Deja una respuesta
¡Más Contenido!