
Transformador diferencial variable lineal (LVDT) y cómo funciona
El término LVDT o Transformador diferencial variable lineal es un transductor de disposición lineal robusto, completo y naturalmente sin fricción. Tienen un ciclo de vida interminable cuando se usan correctamente. Debido a que el LVDT controlado por CA no incluye ningún tipo de electrónica, estaba diseñado para funcionar a temperaturas muy bajas, si no hasta 650 °C (1200 °F) en entornos insensibles. Las aplicaciones de los LVDT incluyen principalmente automatización, turbinas eléctricas, aeronaves, hidráulica, reactores nucleares, satélites y muchas otras. Este tipo de transductores contienen fenómenos físicos bajos y una repetición excepcional.
El LVDT cambia una dislocación lineal de una posición mecánica a una señal eléctrica relativa que incluye información de dirección y distancia de fase y amplitud. El funcionamiento del LVDT no necesita una conexión eléctrica entre las partes en contacto y la bobina, sino que depende del acoplamiento electromagnético.
-
¿Qué es un LVDT (transformador diferencial variable lineal)?
- Construcción de transformador diferencial variable lineal
- Principio de funcionamiento de LVDT
- Funcionamiento de un LVDT
- ¿Cuál es la salida de LVDT?
- Diferentes tipos de LVDT
- Características del LVDT
- Especificaciones LVDT
- gráfico LVDT
- Ejemplo de un transformador diferencial variable lineal
- Ventajas y desventajas de LVDT
- Aplicaciones de transformadores diferenciales variables lineales
¿Qué es un LVDT (transformador diferencial variable lineal)?
La forma completa LVDT es "Transformador diferencial variable lineal" es LVDT. Generalmente, el LVDT es un tipo normal de transductor. Su función principal es convertir el movimiento rectangular de un objeto en una señal eléctrica equivalente. LVDT se utiliza para calcular el desplazamiento y funciona según el principio del transformador.
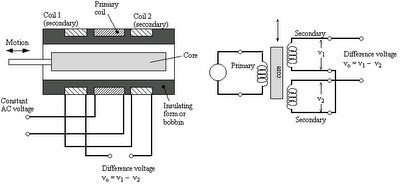
El diagrama del sensor LVDT anterior incluye un núcleo y un conjunto de bobinas. Aquí, el núcleo está protegido por la cosa cuya ubicación se calcula, mientras que el conjunto de bobinas se lleva a una estructura fija. El juego de bobinas incluye tres bobinas enrolladas en forma hueca. La bobina interna es la principal, que es alimentada por una fuente de CA. El flujo magnético generado por la principal se une a las dos bobinas menores, creando un voltaje alterno en cada bobina.

La principal ventaja de este transductor, frente a otros tipos de LVDT, es su robustez. Como no hay contacto material a través del componente de detección.
Debido a que la máquina depende de la combinación de flujos magnéticos, este transductor puede tener una resolución ilimitada. Así, la mínima fracción de progresión puede ser vista por una herramienta de acondicionamiento de señal apropiada, y la resolución del transductor está determinada exclusivamente por la declaración del DAS (sistema de adquisición de datos).
Construcción de transformador diferencial variable lineal
El LVDT comprende una plantilla cilíndrica, que está delimitada por un devanado principal en el centro de la plantilla y los dos devanados menores del LVDT están enrollados en las superficies. La cantidad de giros en los dos devanados menores es equivalente, pero están invertidos entre sí, como en el sentido de las agujas del reloj y en el sentido contrario.
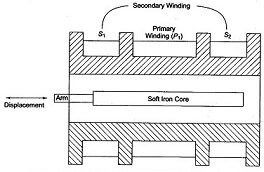
Por esta razón, los voltajes o/p serán la variación de los voltajes entre las dos bobinas menores. Estas dos bobinas se denominan S1 y S2. El núcleo de hierro estimado se encuentra en el medio del cilindro antiguo. El voltaje de excitación de la corriente alterna es de 5 a 12 V y la frecuencia de operación es de 50 a 400 HZ.
Principio de funcionamiento de LVDT
El principio de funcionamiento del transformador diferencial variable lineal o la teoría de funcionamiento del LVDT es la inducción mutua. La dislocación es energía no eléctrica que se transforma en energía eléctrica. Y, cómo se cambia la energía se analiza en detalle en la operación de un LVDT.
Funcionamiento de un LVDT
El funcionamiento del diagrama del circuito LVDT se puede dividir en tres casos según la posición del núcleo de hierro en el molde aislado.
- En el Caso-1: Cuando el núcleo del LVDT está en la ubicación nula, el flujo de los dos devanados menores será igual, por lo que la fem inducida es similar en los devanados. Entonces, sin dislocación, el valor de salida (eafuera) es cero porque e1 y e2 son equivalentes. Por lo tanto, esto ilustra que no se ha producido ninguna dislocación.
- En el caso 2: Cuando el núcleo LVDT se desplaza al punto cero. En este caso, el flujo que involucra el devanado menor S1 es adicional al flujo que se conecta al devanado S2. Por este motivo, se sumará e1 como el de e2. Debido a estoafuera (voltaje de salida) es positivo.
- En el caso 3: Cuando el núcleo del LVDT se mueve al punto cero, en este caso, la cantidad de e2 se sumará a la de e1. Debido a estoafuera el voltaje de salida será negativo cuanto más ilustre el o/p en el punto de localización.
¿Cuál es la salida de LVDT?
La salida del dispositivo de medición como el LVDT o el Transformador diferencial variable lineal es una onda sinusoidal con amplitud proporcional a la ubicación descentrada y 0⁰ de lo contrario 180⁰ de fase según el lado ubicado del núcleo. Aquí, la rectificación de onda completa se usa para demodular la señal. El valor más alto de salida del motor (EOUT) ocurre en el desplazamiento más alto del núcleo desde la posición media. Es una función de la amplitud de la tensión de excitación del lado principal, así como del factor de sensibilidad del tipo específico de LVDT. En general, esto es bastante considerable en RMS.
¿Por qué usar un LVDT?
Un sensor de posición como LVDT es ideal para varias aplicaciones. Aquí hay una lista de las razones por las que se usa.
La vida mecánica es infinita.
Este tipo de sensor no se puede reemplazar incluso después de millones de ciclos y décadas.
Núcleo y bobina separables
Los LVDT son bombas, válvulas y sistemas de nivel utilizados. El núcleo LVDT puede estar expuesto a fluidos de alta temperatura y alta presión siempre que las bobinas y la carcasa estén separadas por metal, tubos de vidrio, fundas, etc.
La medición es sin fricción
La medición de LVDT no tiene fricción porque no hay partes que se rocen, no hay errores ni resistencia.
La resolución es infinita.
Mediante el uso de LVDT, también se pueden calcular con precisión pequeños movimientos.
La repetibilidad es excelente
Los LVDT no flotan, de lo contrario eventualmente se vuelven ruidosos incluso después de décadas.
Insensibilidad al movimiento transversal del núcleo.
La calidad de la medición no puede verse comprometida ni las sensaciones ni los zigzags.
La repetibilidad es cero
De 300oF a 1000oF, estos sensores siempre le brindan un punto de referencia confiable
- Sin necesidad de electrónica a bordo
- Versión completa
- La personalización es posible para cualquier tipo de aplicación.
Diferentes tipos de LVDT
Los diferentes tipos de LVDT son los siguientes.
Armadura cautiva LVDT
Estos tipos de LVDT son superiores para largas tiradas de trabajo. Estos LVDT ayudarán a evitar un montaje incorrecto, ya que están dirigidos y controlados por conjuntos de baja resistencia.
Racores no guiados
Estos tipos de LVDT tienen un comportamiento de resolución ilimitado, el mecanismo de este tipo de LVDT es un plano sin desgaste que no controla el movimiento de los datos calculados. Este LVDT está conectado a la muestra que se va a calcular, encajando sin apretar en el cilindro, lo que implica que el cuerpo del transductor lineal se sostenga de forma independiente.
Forzar refuerzos extendidos
Utilice mecanismos de resorte internos, motores eléctricos para hacer avanzar constantemente la armadura hasta su nivel más alto posible. Estas armaduras se utilizan en LVDT para aplicaciones de movimiento lento. Estos dispositivos no necesitan ninguna conexión entre la armadura y la muestra.
Los transductores lineales de desplazamiento variable se utilizan normalmente en herramientas de mecanizado actuales, robótica o control de movimiento, aviónica y automatización. La elección de un tipo aplicable de LVDT se puede medir utilizando ciertas especificaciones.
Características del LVDT
Las características de LVDT se analizan principalmente en tres casos, como la posición nula, la posición superior derecha y la posición superior izquierda.
posición nula
El procedimiento de trabajo de LVDT se puede ilustrar en el lugar axial cero o cero en la siguiente figura. En esta condición, el eje se puede ubicar exactamente en el centro de los devanados S1 y S2. Aquí, estos devanados son devanados secundarios, que en consecuencia aumentan la generación de flujo equivalente así como el voltaje inducido a través de las terminales de la siguiente terminal. Esta ubicación también se denomina posición nula.
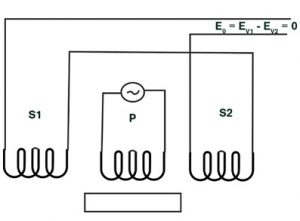
La secuencia de fase de salida, así como la diferenciación de la amplitud de salida de las señales de entrada que se derivan del desplazamiento y movimiento del núcleo. La disposición del eje en la ubicación neutral o cero indica principalmente que los voltajes inducidos a través de los devanados secundarios que están conectados en serie son equivalentes e inversamente proporcionales al voltaje de salida neto.
EV1= EV2
Eo = EV1– EV2 = 0V
Posición más alta a la derecha
En este caso, la posición más alta a la derecha se muestra en la siguiente figura. Una vez que el eje se mueve en la dirección del lado derecho, se puede generar una gran fuerza en el devanado S2, por otro lado, se puede generar la fuerza mínima en el devanado S1.
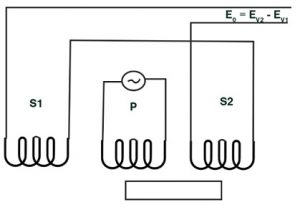
Entonces, el 'E2' (voltaje inducido) es considerablemente más alto que E1. Las ecuaciones de voltaje diferencial resultantes se muestran a continuación.
Eo = EV2 – EV1
Posición máxima izquierda
En la siguiente figura, el eje se puede inclinar más en la dirección del lado izquierdo, luego se puede generar un alto flujo a través del devanado S1 y se puede inducir voltaje a través de 'E1' cuando se reduce 'E2'. La ecuación para esto se da a continuación.
Eo = EV1 – EV2
La salida final del LVDT se puede calcular en términos de frecuencia, corriente o voltaje. Este diseño de circuito también se puede hacer con circuitos basados en microcontroladores como PIC, Arduino, etc.

Especificaciones LVDT
Las especificaciones de LVDT incluyen lo siguiente.
linealidad
La mayor diferencia de la proporción directa entre la distancia calculada y la distancia o/p sobre el rango de cálculo.
- > (0,025 + % o 0,025 – %) Fondo de escala
- (0,025 a 0,20 + % o 0,025 a 0,20 – %) Fondo de escala
- (0,20 a 0,50 + % o 0,20 a 0,50 – %) Fondo de escala
- (0,50 a 0,90 + % o 0,50 a 0,90 – %) Fondo de escala
- (0,90 a + % o 0,90 a – %) Fondo de escala y más
- 0,90 a ±% escala completa y más
Temperaturas de funcionamiento
Las temperaturas de funcionamiento de LVDT incluyen
> -32 °F, (-32-32 °F), (32 -175 °F), (175-257 °F), 257 °F y más. El rango de temperatura en el que el dispositivo debe operar con precisión.
Rango de medición
El rango de medición IVDT incluye
0,02″, (0,02-0,32″), (0,32 – 4,0″), (4,0-20,0″), (±20,0″)
Precisión
Explica la diferencia porcentual entre el valor real de la cantidad de datos.
Producción
Corriente, voltaje o frecuencia
Interfaz
Un protocolo serie como RS232 o un protocolo paralelo como IEEE488.
tipos de LVDT
Basado en frecuencia, basado en balance de corriente CA/CA o basado en CC/CC.
gráfico LVDT
Los diagramas gráficos de LVDT se muestran a continuación y muestran las variaciones del eje y su resultado en términos de la magnitud de la salida de CA diferencial desde un punto nulo y la salida de CC de la electrónica.
El valor máximo del desplazamiento del eje en relación con la ubicación del núcleo depende principalmente del factor de sensibilidad, así como de la magnitud del voltaje de excitación principal. El eje permanece en la posición cero hasta que se especifica un voltaje de excitación principal de referencia para el devanado de la bobina principal.
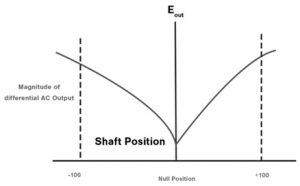
Como se muestra en la figura, la polaridad DC o/p o el cambio de fase define principalmente la posición del eje para que el punto cero represente la propiedad como la linealidad o/p del módulo LVDT.
Ejemplo de un transformador diferencial variable lineal
La longitud de carrera de un LVDT es de ±120 mm y genera una resolución de 20 mV/mm. Entonces, 1). encuentre el voltaje de apertura máximo, 2) el voltaje de apertura después de que el núcleo se desplace 110 mm desde su ubicación nula, c) la posición del núcleo desde el medio una vez que el voltaje de apertura es de 2,75 V, d) encuentre el cambio en el voltaje de salida después de que el núcleo se haya movido de +60 mm a -60 mm de desplazamiento.
a). El voltaje de salida más alto es VOUT
Si un mm de movimiento genera 20 mV, entonces 120 mm de movimiento genera
VSALIDA = 20 mV x 120 mm = 0,02 x 120 = ±2,4 voltios
b). VOUT con recorrido central de 110 mm
Si un movimiento de núcleo de 120 mm genera una salida de 2,4 voltios, un movimiento de 110 mm produce
Vout = desplazamiento del núcleo X VMAX
Vsalida = 110 X 2,4/120 = 2,2 voltios
El desplazamiento de voltaje de LVDT
contra). La posición del núcleo cuando VOUT = 2,75 voltios
Vout = desplazamiento del núcleo X VMAX
Desplazamiento = Vsal X longitud/ VMax
D=2.75X120/2.4=137.5mm
D). El cambio de voltaje de desplazamiento de +60 mm a -60 mm
Vcambio = +60 mm – (-60 mm) X 2,4 V/130 = 120 X 2,4/130 = 2,215
Por lo tanto, el cambio de voltaje de salida varía de +1,2 voltios a -1,2 voltios a medida que el núcleo cambia de +60 mm a -60 mm respectivamente.
Los sensores de desplazamiento están disponibles en diferentes tamaños con diferentes longitudes. Estos transductores se utilizan para medir desde unos pocos mm hasta 1 s, lo que puede determinar recorridos largos. Sin embargo, cuando los LVDT son capaces de calcular el movimiento lineal en línea recta, hay un cambio en el LVDT para medir el movimiento angular conocido como RVDT (Transformador diferencial variable giratorio).
Ventajas y desventajas de LVDT
Las ventajas y desventajas de LVDT son las siguientes.
- La medición del rango de recorrido del LVDT es muy alta y varía de 1,25 mm a -250 mm.
- La salida LVDT es muy alta y no requiere ninguna extensión. Tiene una gran compasión, que normalmente ronda los 40 V/mm.
- Cuando el núcleo se mueve en una plantilla hueca, no hay fallas en la entrada de recorrido durante la pérdida por fricción, lo que hace que un LVDT sea un dispositivo preciso.
- LVDT demuestra una histéresis pequeña y, por lo tanto, la repetición es excepcional en todas las situaciones
- El consumo de energía de LVDT es muy bajo, alrededor de 1 W, según la clasificación de otros tipos de transductores.
- El LVDT transforma la dislocación lineal en un voltaje eléctrico que es fácil de cambiar.
- LVDT es reactivo para alejarse de los campos magnéticos, por lo que necesita constantemente un sistema para protegerlos de los campos magnéticos a la deriva.
- Se logra que los LVDT sean más beneficiosos que cualquier tipo de transductor inductivo.
- El LVDT se daña por la temperatura y la vibración.
- Este transformador necesita grandes desplazamientos para obtener una salida diferencial significativa
- Estos son sensibles a los campos magnéticos perdidos.
- El instrumento receptor debe elegirse para operar con señales de CA; de lo contrario, se debe usar un demodulador n/w si se requiere una salida de CC.
- La respuesta dinámica limitada está ahí mecánicamente a través de la masa del núcleo y eléctricamente a través del voltaje aplicado.
Aplicaciones de transformadores diferenciales variables lineales
Las aplicaciones del transductor LVDT incluyen principalmente dislocaciones calculadas que van desde una división de mm hasta sólo unos pocos cm.
- El sensor LVDT funciona como el transductor principal y transforma la dislocación en una señal eléctrica directa.
- Este transductor también puede funcionar como un transductor secundario.
- LVDT se utiliza para medir el peso, la fuerza y también la presión
- En cajeros automáticos por el grosor del billete de un dólar
- Utilizado para pruebas de humedad del suelo.
- En MÁQUINAS PARA HACER PASTILLAS
- robot limpiador
- Se utiliza en dispositivos médicos para sondear el cerebro.
- Algunos de estos transductores se utilizan para calcular la presión y la carga.
- Los LVDT se utilizan principalmente en industrias, así como en servomecanismos.
- Otras aplicaciones como turbinas eléctricas, hidráulica, automatización, aeronaves y satélites
Finalmente, de la información anterior, podemos concluir que las características de los LVDT tienen ciertas características y ventajas significativas, la mayoría de las cuales se derivan de los principios físicos fundamentales de funcionamiento o de los materiales y técnicas utilizados en su construcción. Aquí hay una pregunta para usted, ¿cuál es el rango de sensibilidad normal de LVDT?
Si quieres conocer otros artículos parecidos a Transformador diferencial variable lineal (LVDT) y cómo funciona puedes visitar la categoría Generalidades.
Deja una respuesta
¡Más Contenido!