
Características de velocidad del motor de CC
Cuando se aplica par de carga a un motor, el motor se desacelera debido a que la carga se opone a la rotación de la máquina. Eventualmente, el par electromagnético de la máquina será igual al par de carga y se alcanzará una nueva velocidad de estado estable. La variación de la velocidad depende del tipo de conexión de la zona.
Para cuantificar el cambio de velocidad con la carga, definimos el regulación de velocidad:
[begin{matrix} SR=frac{{{n}_{nl}}-{{n}_{fl}}}{{{n}_{nl}}} & {} & left( a right) end{matrix}]
Tenga en cuenta que este es exactamente el mismo formato que la regulación de voltaje para el generador. Al igual que el generador de CC, el motor de CC puede tener un campo en derivación, un campo en serie o ambos. El campo de derivación se puede excitar por separado o se puede excitar desde el mismo suministro que la armadura.
También se puede conectar una máquina compuesta (motor) como shunt largo o shunt corto, acumulativo o diferencial. Los motores de CC rara vez se utilizan con una composición diferencial deliberada. Ahora consideraremos las características de velocidad de cada tipo de motor de CC.
motor desviado
La velocidad del motor como función de la corriente de armadura se puede encontrar con la siguiente ecuación:
[begin{matrix} n=frac{{{V}_{t}}-{{I}_{a}}{{R}_{a}}}{{{K}_{g}}{{phi }_{p}}} & {} & left( 1 right) end{matrix}]
Apropiadamente, llamamos a la ecuación 1 la ecuación de velocidad. En el caso de una máquina en derivación conectada a un voltaje constante, el flujo por polo es constante.
Por lo tanto, la ecuación de velocidad es una relación lineal no y yo mismoa. La figura 1 muestra la velocidad de un motor de derivación de CC en función de la corriente de armadura. El caso ideal, descrito por la ecuación de velocidad, se muestra mediante la línea continua gruesa. Sin embargo, cuando la corriente de carga aumenta, la reacción del inducido tiende a reducir el flujo por polo.
Si el denominador de la ecuación de la velocidad se vuelve más pequeño, está claro que la velocidad de la máquina será más alta de lo esperado. La línea punteada en la Figura 1 muestra cómo una reacción moderada del inducido puede afectar la velocidad del motor.
Regulación de velocidad normalmente del 8 % al 10 % para derivaciones de motores de CC. Si la reacción del inducido es lo suficientemente fuerte, la velocidad puede comenzar a aumentar con la carga, como se muestra en la curva discontinua de la Figura 1. Esto se traduce en regulación de velocidad negativalo cual es tan indeseable como la regulación de voltaje negativo en un generador.
Muchas cargas usan más potencia a velocidades más altas, por lo que podemos entrar en una condición inestable a medida que aumenta la velocidad del motor a medida que aumenta la carga y la carga aumenta más a medida que aumenta la velocidad. Una solución es agregar un campo en serie, lo que aumentará el campo a medida que aumente la corriente de carga.
Mirando la ecuación 1, debe quedar claro que si el campo del motor de CC se reduce a cero, el motor acelerará a velocidades inaceptables. Tal condición se llama huyó y puede causar serios daños al motor.
Si se pierde el campo, la armadura se acelera a una velocidad muy alta, provocando grandes fuerzas centrífugas en los componentes de la armadura, que pueden hacer volar las barras del conmutador o mover las bobinas fuera de sus ranuras. Para evitar tal daño, es importante que el motor ser proteger contra la pérdida de campo.
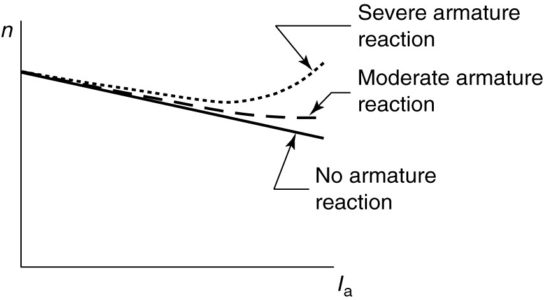
FIGURA 1: Velocidad característica de un motor de derivación de CC.
También es instructivo considerar la variación del par con la corriente de carga. Recordamos la ecuación del par electromagnético (ecuación 2):
$begin{matriz} {{T}_{d}}={{K}_{m}}{{phi }_{p}}{{I}_{a}} & {} & izquierda ( 2 right) end{matriz}$
Si el flujo es constante, obviamente se esperaría que el par sea una función lineal de la corriente de armadura. La figura 2 muestra el par en función de la corriente del inducido para un motor de derivación de CC. Sin embargo, al igual que con la velocidad, la reacción del inducido tiene un efecto. A medida que aumenta la corriente de armadura, el flujo por polo disminuye, lo que hace que el par electromagnético sea ligeramente más bajo de lo esperado.
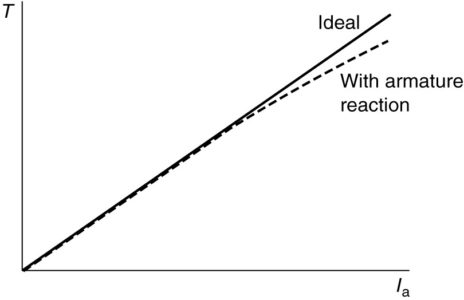
FIGURA 2: Característica de par del motor de derivación de CC.
Podemos cruzar la velocidad por par sustituyendo la corriente en la ecuación de velocidad de la ecuación 2, lo que da
[begin{matrix} n=frac{{{V}_{t}}-{{R}_{a}}left( frac{{{T}_{d}}}{{{K}_{m}}{{phi }_{p}}} right)}{{{K}_{g}}{{phi }_{p}}} & {} & left( 3 right) end{matrix}]
Para un motor en derivación con voltaje terminal constante y sin retroalimentación de armadura, existe una relación lineal entre la velocidad y el par, como se muestra en la línea sólida de la Figura 3.
reacción de armadura hará que la velocidad caiga más rápido con el par y limitará el par de la máquina de alta corriente como se muestra en la línea de puntos. El efecto práctico de esto es que el par de arranque del motor de derivación se limita a aprox. 125%-200% el par nominal y la corriente de arranque al mismo porcentaje de la corriente nominal.

FIGURA 3: Característica de par-velocidad de un motor de derivación de CC.
Motor estándar
El circuito equivalente para una máquina en serie DC se muestra en la siguiente figura.
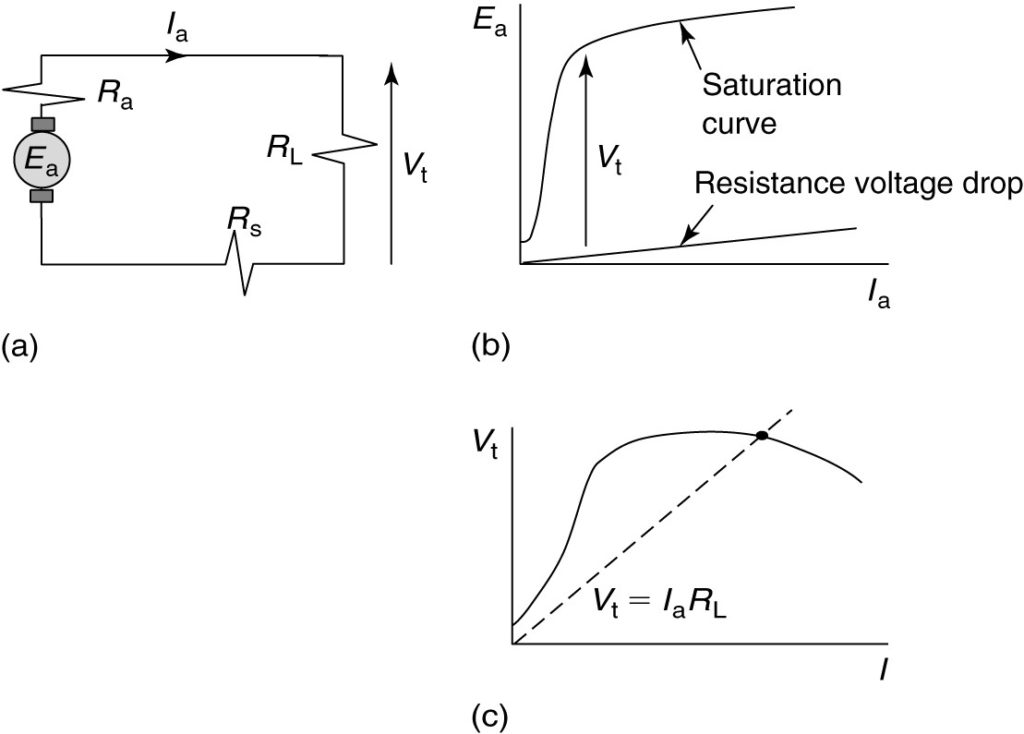
FIGURA: Motor CC estándar.
una. Circuito equivalente.
b. Curva de saturación y caída de voltaje a través de la armadura y el campo en serie.
contra. Voltaje terminal.
La ecuación de velocidad para el motor en serie de CC es similar a la del shunt, pero debemos incluir la resistencia del campo en serie:
[begin{matrix} n=frac{{{V}_{t}}-{{I}_{a}}left( {{R}_{a}}+{{R}_{s}} right)}{{{K}_{g}}{{phi }_{p}}} & {} & left( 4 right) end{matrix}]
Sin embargo, en el caso del motor de CC en serie, el flujo por polo es una función de la corriente de armadura.
En la parte lineal de la curva de magnetización, el flujo es proporcional a la corriente de armadura, por lo que la corriente de armadura puede reemplazar el flujo con una corriente constante. Dividiendo la ecuación 4 en dos términos y cancelando la corriente de armadura del numerador y el denominador del segundo término se obtiene
[begin{matrix} n=frac{{{V}_{t}}}{{{K}_{g}}K{{I}_{a}}}-frac{left( {{R}_{a}}+{{R}_{s}} right)}{{{K}_{g}}K} & {} & left( 5 right) end{matrix}]
La ecuación 5 representa una relación inversa entre la velocidad, no, y la corriente de armadura, yoa , como se muestra en la Figura 4. Entonces, cuando la corriente de polarización es cero, la velocidad de la máquina se vuelve muy grande. Por este motivo, es necesario mantenga siempre una carga en un motor de CC en serie, lo que significa que la carga debe estar conectada directamente al eje en lugar de a través de una transmisión por correa o cadena, que podría desconectarse. Cuando la corriente se vuelve alta, lo que indica una carga pesada en el motor, la velocidad cae. Por supuesto, la serie de regulación de velocidad del motor es muy débil.
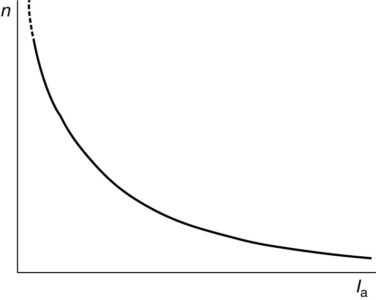
FIGURA 4: Velocidad característica de un motor DC en serie.
Nuevamente, si estamos operando en la parte lineal de la característica de magnetización, el flujo es proporcional a la corriente de armadura y podemos reemplazar el flujo con la corriente multiplicada por la constante, lo que da
$begin{matriz} {{T}_{d}}={{K}_{m}}{{phi }_{p}}{{I}_{a}}={{K}_ { {m}}K{{I}_{a}}{{I}_{a}}={{K}^{'}}I_{a}^{2} & {} & left( 6 derecha) end{matriz}$
De la ecuación 6, suponemos que par motor en serie de CC varía con el cuadrado de la corriente de armadura (en la parte lineal de la curva de magnetización). Esto se muestra en la Figura 5 por la línea continua.
Cuando el hierro de la máquina se satura con una corriente de armadura alta (que también es la corriente de campo), el flujo por polo se vuelve esencialmente constante. Así, las curvas de las Figuras 4 y 5 se vuelven lineales a valores altos de corriente de armadura, como lo muestra la línea de puntos en la Figura 5.
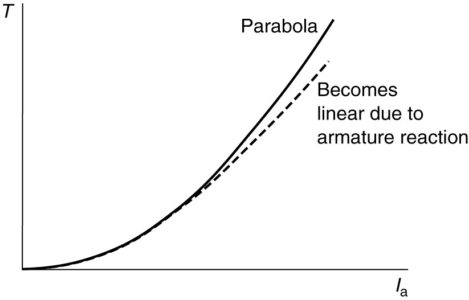
FIGURA 5: Característica de par de un motor en serie de CC.
es interesante que especialmente trazando la velocidad en función del par para serie de motores. Esto se ilustra en la Figura 4. El motor de la serie de CC produce un par de arranque muy alto y, como se mencionó anteriormente, funciona sin carga.
Por ejemplo, motores de serie útil para conducir vagones de metro cuando se requiere un alto par sin parar. El par del 400 % solo puede proporcionar el 200 % de la corriente debido a la relación cuadrática.
Por otra parteLos motores estándar no serían útiles para los autos eléctricos porque habría poco torque para ir a altas velocidades en la carretera.
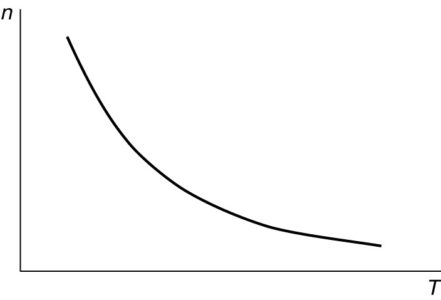
FIGURA 4: Característica de par-velocidad de un motor en serie de CC.
Motores de CC compuestos
Dado que los motores compuestos tienen devanados de campo tanto en serie como en derivación, se puede esperar que las características del motor compuesto reflejen las características tanto del motor en serie como del motor en derivación. Es verdad; sin embargo, las características del motor compuesto varían mucho con la fuerza relativa de los campos en serie y en derivación. el es hay más vueltas de tuerca en el campo de las series, cuanto mayor sea el par de arranque, peor será la regulación de la velocidad (20%-50%). Dado que existe un campo de derivación, el motor tiene una velocidad sin carga definida y segura.
Muchos motores de derivación de CC tienen una bobina en serie pequeña con solo unas pocas vueltas (quizás solo 1 o 2). se llama un motor de derivación estabilizado.
La bobina en serie proporciona MMF adicional a corrientes de armadura altas, lo que compensa la retroalimentación de la armadura y evita que la máquina regule la velocidad negativa. De hecho, la regulación de velocidad de un motor en derivación estabilizado puede hacerse muy baja, pero positiva.
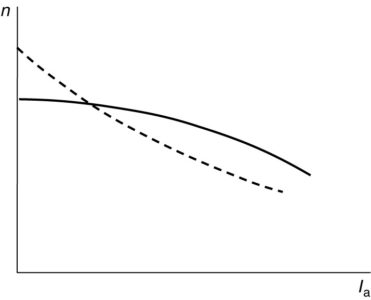
FIGURA 5: Características de velocidad del motor de CC compuesto.
La figura 5 muestra las características de velocidad versus corriente de armadura de motores de CC compuestos. La curva punteada tiene un campo en serie intenso y muestra una regulación de velocidad más débil y la curva sólida tiene un campo en serie más débil y actúa más como un motor de derivación.
La figura 6 muestra las características del par frente a la corriente de armadura para motores en serie, en derivación y compuestos. Como hemos visto, la característica par-corriente es lineal para un motor en derivación y parabólica para un motor en serie. Como era de esperar, la característica de par del motor compuesto caerá en algún lugar entre las características en serie y en derivación.
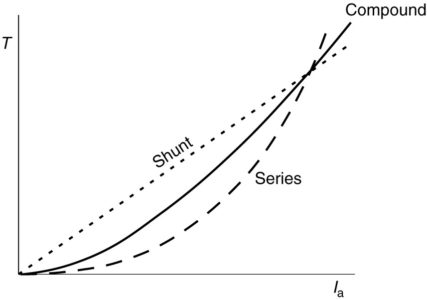
FIGURA 6: Comparación de las características de par de los motores de CC en serie, en derivación y compuestos.
La figura 7 muestra las conexiones para una composición acumulativa de motor de derivación larga y corta. La corriente ingresa al motor y debe ingresar a los dos devanados de campo en la terminal 1 para hacer que ambos devanados de campo produzcan flujo en la misma dirección. Por lo tanto, el devanado en serie se invirtió de lo que era para la operación del generador.
Máquinas Acumulativas Acumulativas tendrá regulación de velocidad positiva; es decir, la velocidad cae a medida que el par de carga aumenta hasta su valor nominal.
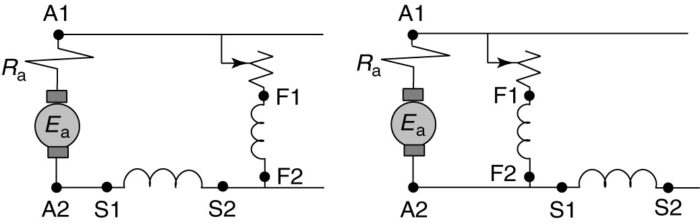
FIGURA 7: Enlaces de motores compuestos.
La Figura 8 muestra las características de par-velocidad de tres máquinas compuestas. La curva continua se hunde ligeramente, correspondiente a un bobinado en serie ligero, aunque la curva punteada es mucho mayor, correspondiente a una Terminación de serie pesada. Una tercera curva, mostrada en líneas punteadas, es una posibilidad que podría surgir en un motor diferencialmente compuesto.
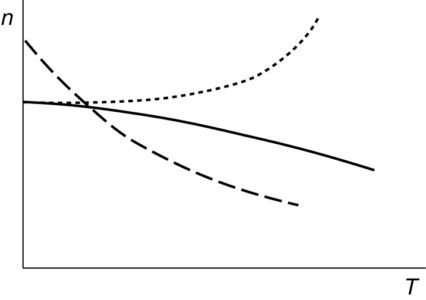
FIGURA 8: Características potenciales de par-velocidad de los motores compuestos.
Motores DC con composición diferencial
Esta conexión casi nunca se usa intencionalmente, pero a veces los motores se conectan de esta manera por accidente.
Composición diferencial de la regulación de velocidad del motor de CC
Sin embargo, puede proporcionar una excelente conexión diferencial. regulación de velocidad, porque la aplicación de una carga provoca una caída en la velocidad, lo que significa que la C-EMF cae. Cuando la C-EMF disminuye, la corriente del inducido aumenta, lo que hace que el flujo disminuya debido a la composición diferencial, lo que hace que la C-EMF disminuya nuevamente. Entonces podemos obtener grandes cambios en la corriente de armadura sin mucha aceleración.
Motor de par de CC compuesto diferencial
el es par inicial de un motor con una mala composición diferencial porque los campos en serie y en derivación se anulan entre sí. Por lo tanto, generalmente es necesario acortar el campo en serie para arrancar un motor de composición diferencial.
Si el campo en serie es demasiado fuerte, la velocidad del motor se vuelve inestable a medida que se agrega una carga. Según la relación de rotación de los dos devanados de campo, el motor puede tener una velocidad excesiva, como se muestra en la curva discontinua de la Figura 8, o puede detenerse o incluso alternar entre la rotación hacia adelante y hacia atrás. En todos los casos se producen corrientes y pares muy elevados.
¡Más Contenido!