
La Figura 1 muestra la vista en sección transversal de una fase Motor de inducción. Considere el motor en la Figura 1 detenido. Se aplica una corriente a los devanados, creando dos ondas que giran en sentido contrario. Cuando pasan por las barras del rotor, ambos intentan poner en marcha la máquina, pero se anulan mutuamente. Por tanto, una máquina monofásica no produce par de arranque y debe ser arrancada por medios auxiliares.
Figura 1: Sección del motor de inducción monofásico.
La Figura 2 muestra la curva par/deslizamiento que estudiamos para la máquina multifásica. Se puede pensar en esta curva como el resultado de la onda que viaja hacia adelante. La onda que se mueve hacia atrás formará una curva que es la imagen especular del origen.
Tenga en cuenta que el par positivo de la onda viajera hacia adelante es mayor que el par de frenado negativo de la onda inversa, después de que la máquina está en marcha. Entonces, si podemos arrancar la máquina, se apretará y seguirá funcionando. De hecho, a medida que el rotor gira cuando el motor está funcionando, el par de avance aumenta y el par de retroceso disminuye. Por lo tanto, el par resultante es aún mejor, acercándose al rendimiento de una máquina polifásica con la misma densidad de flujo del rotor y entrehierro.
- También puede leer: Principio de funcionamiento del motor de inducción trifásico
Tenga en cuenta que el par que se muestra es el promedio del par real, que pulsa a una frecuencia de 120 Hz (para un motor de 60 Hz).
el es la potencia suministrada a un circuito monofásico pulsa al doble de la frecuencia de la fuente. Dado que el par de potencia se divide por la velocidad del motor, el par también es vibración.
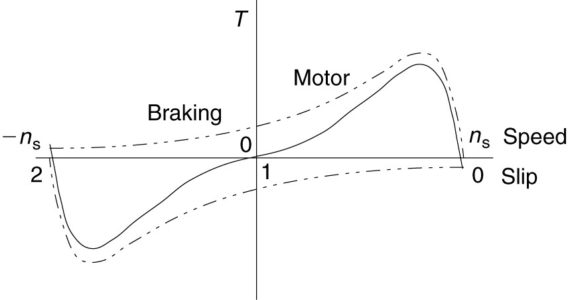
Figura 2: Curvas par-velocidad directa, inversa y combinada para un motor de inducción monofásico.
Curiosamente, para considerar el funcionamiento de un motor monofásico, es necesario considerar un motor bifásico. La figura 3 muestra un motor con dos juegos de bobinas separadas físicamente por 90 grados eléctricos.
Las bobinas se muestran concentradas en una sola ranura, pero en realidad ocuparían varias ranuras, como la bobina de la Figura 1.
Considere la situación en la que la máquina está energizada y las corrientes fluyen a través de las bobinas. Las corrientes se desplazan 90° en el tiempo. Es decir, una bobina tiene corriente sinusoidal y la otra bobina tiene corriente coseno.
A 0°, la corriente en la bobina a es positiva y máxima, y la corriente en la bobina b es cero. Por lo tanto, los polos N y S del flujo se encuentran a lo largo del eje de la bobina a.
A 45°, las dos corrientes son iguales. Por lo tanto, la onda pico de la onda de flujo se encuentra entre los ejes de la bobina. El polo N se gira 45°. Continuando con un ciclo de corriente, vemos que el campo magnético gira, igual que en una máquina trifásica. Debido a que hay un campo giratorio, la máquina producirá un par inicial.
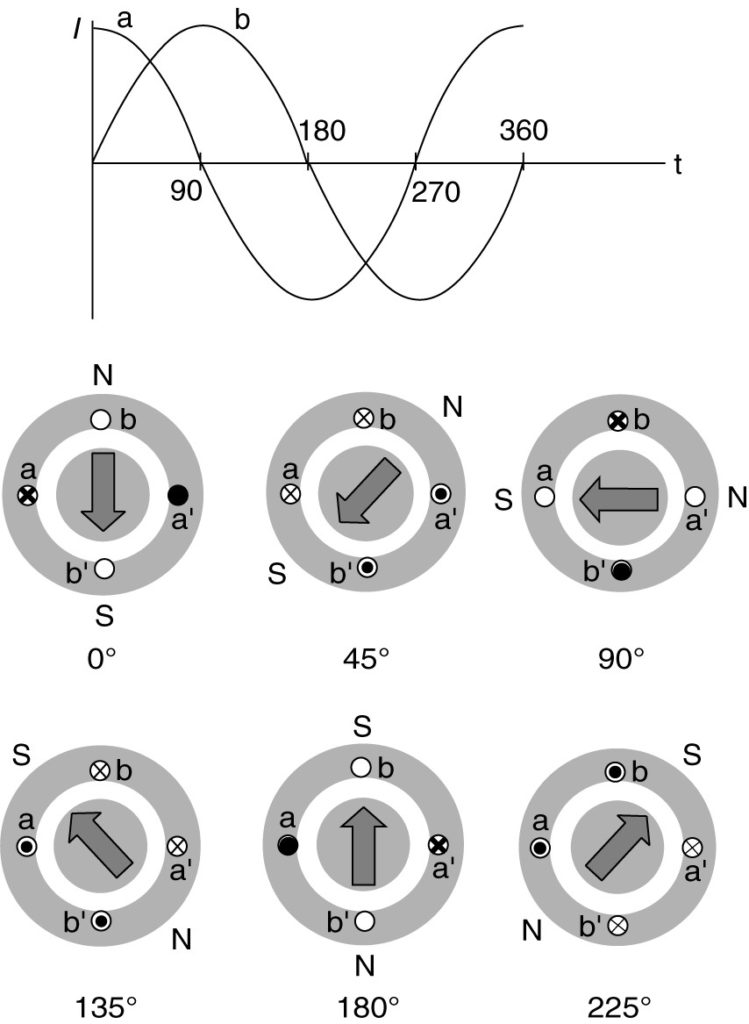
Figura 3: Posiciones de corriente y flujo de motores de inducción bifásicos en función del tiempo.
Desafortunadamente, no ofrecemos corrientes bifásicas. Necesitamos un motor monofásico, y probablemente solo tengamos voltaje y corriente monofásicos. Afortunadamente, podemos imitar la máquina bifásica diseñando correctamente el devanado de la máquina monofásica.
Considere ambos serie RL circuitos se muestra en la Figura 4. Estos dos circuitos se pueden usar para representar los equivalentes agrupados de nuestros dos devanados de motor. Ambos tienen el mismo voltaje de operación y reactancias similares, pero uno tiene una resistencia más alta.
El ángulo de impedancia, θ = tan-1(X/R), por lo que el circuito con mayor resistencia tendrá un ángulo de impedancia menor y las corrientes en ambos circuitos estarán desfasadas. Llamemos a estas corrientes I1y yo mismo2.
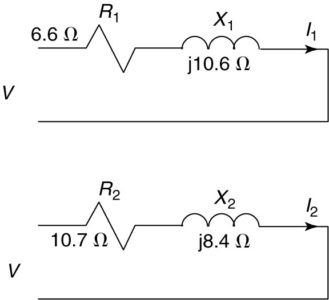
Figura 4: Dos bobinas con diferentes impedancias.
Usando los valores del circuito dados en la Figura 4, podemos calcular las amplitudes y los ángulos como se muestra en las Ecuaciones 1 y 2.
$begin{matriz} {{I}_{1}}=frac{V}{{{Z}_{1}}}=frac{120}{left( 6.6+j10.6 right) Omega }=9.6angle -{{58}^{o}}A & {} & left( 1 right) end{matriz}$
$begin{matriz} {{I}_{2}}=frac{V}{{{Z}_{2}}}=frac{120}{left( 10.7+j8.4 right) Omega }=8.8angle -{{38}^{o}}A & {} & left( 2 right) end{matriz}$
La amplitud del cambio de fase entre I1y yo mismo2 es la diferencia numérica entre los ángulos obtenidos por las ecuaciones 1 y 2. El cambio de paso es | -58° – (-38°) | o 20°.
Podemos aumentar la resistencia de la bobina usando un cable de menor diámetro, y la inductancia de fuga se puede reducir colocándolo más cerca del espacio de aire en las ranuras del estator.
En la práctica, sin embargo, no podemos lograr más de unos 30° de separación cambiando la impedancia de las bobinas. Entonces, al cambiar la impedancia en ambos devanados, podríamos producir corrientes fuera de fase y producir un campo magnético giratorio débil para arrancar el motor. Debido a que una de las bobinas tiene una alta resistencia, generará mucho calor y será ineficaz. Por lo tanto, no queremos ejecutarlo cuando se enciende el motor.
En lugar de añadir resistencia a este último RL circuito para producir un cambio de fase, podríamos agregar un capacitor y obtener aún más cambios de fase. Este concepto se ilustra en la Figura 5(a). Usando los valores del circuito dados en la Figura 5, podemos calcular la magnitud y el ángulo de I3como se muestra en la ecuación 3.
La amplitud del cambio de fase entre I1y yo mismo3 si | -58°- (20°) | o 78°. Las corrientes fuera de fase a 90° crean un campo magnético giratorio. yo2 y yo mismo3 no están desfasados 90° pero tienen componentes que lo están. yo2N 90° frente a mí1 y yo mismo3N 90° frente a mí1, la figura 5(b) ilustra esta relación. yo3N es más grande que yo2N porque el condensador de la figura 5(a) produce un cambio de fase mayor que la resistencia más grande de la figura 4(a).
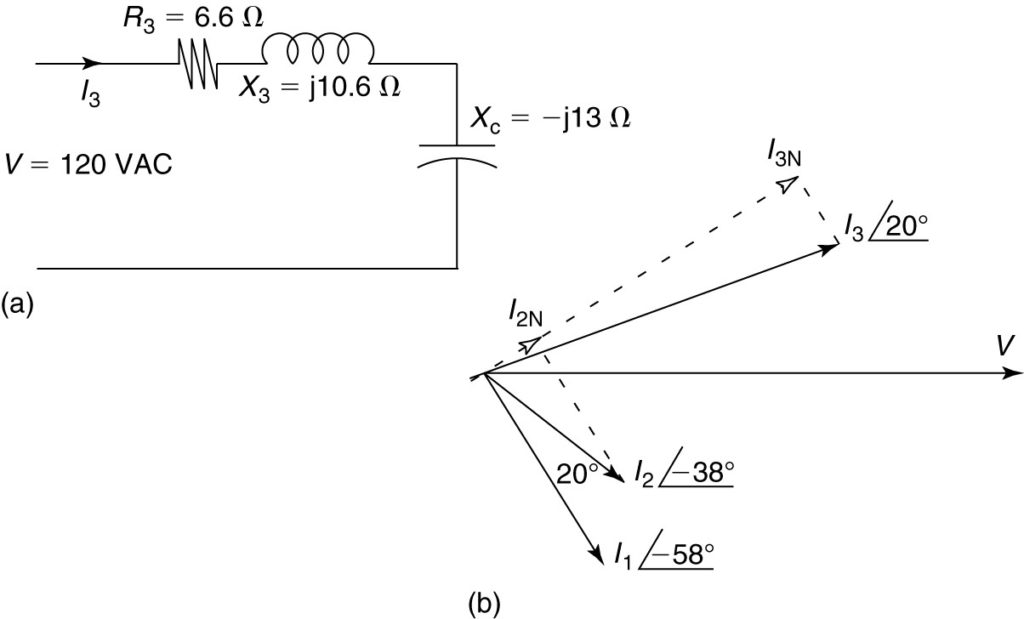
Figura 5: Uso de un condensador para producir un cambio de fase.
- Inicie el circuito de bobinado.
- Diagrama fasorial, para los circuitos de las Figuras 4 y 5(a).
Ambas técnicas (mayor resistencia y mayor capacitancia) se utilizan para fabricar motores de inducción monofásicos.
¡Más Contenido!