
El uso de aislantes digitales robustos en los entornos difíciles de los accionamientos de motores eléctricos
Introducción
Los aisladores digitales robustos son necesarios en los entornos difíciles de las aplicaciones de motores eléctricos. Estos entornos tan duros tienen requisitos de inmunidad a los transitorios de alta tensión que causan perturbaciones en los datos y el efecto de la tensión eléctrica de alta tensión en la vida del aislador. La solución típica para el aislamiento en estas aplicaciones han sido los optoacopladores, que están hechos para soportar altas tensiones gracias a sus gruesas capas de aislamiento interno. El inconveniente de los optoacopladores es que utilizan diodos emisores de luz (LED) que pierden su intensidad luminosa con el tiempo y varían con la temperatura, lo que crea problemas de diseño y fiabilidad. Hay nuevos aisladores digitales más robustos que eliminan el uso de
Los LED y sus problemas de fiabilidad, y tienen una mejor capacidad de aislamiento para competir con el optoacoplador. Estos aisladores digitales tienen la ventaja de aumentar la inmunidad a los transitorios de alta tensión, un requisito en las aplicaciones de control de motores. Este artículo describirá en detalle cómo funcionan estos nuevos aisladores digitales y cómo sus avanzadas capacidades superarán a los optoacopladores en estas aplicaciones.
Aplicaciones
Existe una gama de diseños de sistemas para accionamientos de motores eléctricos, en función del rendimiento y el nivel de potencia de la aplicación, así como de los esquemas particulares de control y aislamiento
esquemas especiales de control y aislamiento. La figura 1 muestra el diagrama de bloques de comunicaciones aislado que se suele utilizar en los accionamientos o motores de gama baja
motores o accionamientos de nivel básico. En este sistema, el controlador está situado al mismo potencial que la etapa de potencia, con la interfaz de comunicaciones aislada, ya que suele ser una interfaz más sencilla y de menor velocidad. En estos sistemas, el convertidor de potencia puede tener controladores de puerta del lado bajo que no necesitan estar aislados porque comparten la misma tierra que la unidad de control del motor. Los controladores del lado alto pueden estar aislados, pero también se pueden utilizar técnicas como el cambio de nivel, especialmente si los niveles de tensión del inversor de potencia no son demasiado altos. En este diagrama de bloques, el controlador del motor tiene una conexión directa con el retorno del inversor sin utilizar el aislamiento. Esta arquitectura tiene limitaciones cuando se utiliza a niveles de potencia más altos. El ruido adicional generado por las señales de conmutación del motor podría sobrecargar la señal de retroalimentación utilizada para controlar la corriente del motor y, potencialmente, provocar una pérdida de control del motor.
Para los accionamientos de mayor rendimiento, como los grandes accionamientos polifásicos utilizados en los motores industriales y los motores de tracción utilizados en los trenes, el control y las comunicaciones aisladas
sería necesario un control y unas comunicaciones aisladas, como se muestra en la figura 2. En este diagrama de bloques del sistema, el control y las comunicaciones están juntos en el lado seguro de la barrera de aislamiento por razones de inmunidad al ruido y mayor velocidad de comunicación. Ahora que la unidad de control del motor está en el lado seguro de la barrera de aislamiento, es necesario aislar a todos los conductores de la puerta. La tensión de aislamiento específica y los requisitos de seguridad vienen determinados por la arquitectura detallada y las ubicaciones de la barrera de aislamiento. En el diagrama de bloques, la retroalimentación del inversor se utiliza para ayudar a controlar el accionamiento del motor y es una de las áreas más críticas del control del motor. La retroalimentación del inversor se muestra conectada a los nodos de medición de corriente iV
y iW en dos fases del motor de CA trifásico. En el esquema del sistema de control y comunicación aislado, el retorno del accionamiento debe conectarse a través de la barrera de aislamiento
en el esquema del sistema de control y comunicación aislado, el retorno del accionamiento debe conectarse a través de la barrera de aislamiento; por tanto, aquí también es necesario el aislamiento. En muchas aplicaciones de motores eléctricos de alta potencia, la arquitectura requerirá un aislamiento reforzado de alta tensión del motor trifásico, para proteger al usuario de la exposición a la alta tensión. Estas aplicaciones reforzadas tienen los mayores requisitos de tensión de aislamiento, lo que puede requerir que el aislante
tener un mayor grosor de aislamiento interno en función de los materiales.
Aislamiento
La capacidad aislante de un aislante es su capacidad de soportar altas tensiones durante su vida útil. Los diferentes tipos de materiales aislantes tendrán
tienen diferentes capacidades en diferentes condiciones ambientales, transitorios de tensión y formas de onda de tensión. El optoacoplador ha sido el tradicional
aislante tradicional de alta tensión por su grueso aislamiento, su capacidad para soportar altas tensiones y su experiencia de décadas en el sector. Los optoacopladores utilizan plástico
los optoacopladores utilizan el moldeado de plástico como aislante, y el proceso puede incluir vacíos de aire en el aislante, lo que provoca descargas parciales y da lugar a fallos de aislamiento.
Por esta razón, los requisitos de certificación de la agencia para las pruebas de alta tensión del aislamiento incluirán pruebas de descarga parcial. A diferencia del optoacoplador, el aislador digital utiliza capas internas de aislamiento producidas en un proceso de fabricación de semiconductores bien definido y altamente controlado para su barrera de aislamiento primaria. Esto elimina los huecos en el aislamiento y hace que la estructura del aislamiento sea mucho más sencilla y robusta. Los aislantes digitales eliminan el uso de LEDs y sus problemas de fiabilidad, y se han hecho más robustos gracias a las mejoras del proceso para aumentar el grosor y la composición de la capa aislante. Algunos aislantes digitales utilizan dióxido de silicio en capa fina para producir un aislante con alta resistencia dieléctrica, que se ha utilizado ampliamente como aislante en conjuntos de semiconductores. La desventaja del aislamiento de dióxido de silicio es que es parte integrante del CI y los daños en el CI pueden provocar daños en el aislamiento. Esta limitación del dióxido de silicio puede superarse utilizando el aislamiento de poliamida, que es un proceso de fabricación de semiconductores que se ha utilizado durante décadas para ayudar a garantizar la resistencia y la estabilidad de los circuitos integrados. El aislamiento interno de poliamida es un proceso posterior y tiene una integridad independiente. Si el CI está dañado, el aislamiento de poliamida independiente permanecerá intacto. Cuando se fabrica en varias capas, la poliimida puede utilizarse como aislamiento reforzado, lo que puede ser necesario en aplicaciones de accionamiento de motores. Los ingenieros que utilicen aisladores digitales necesitarán datos de la vida útil del fabricante que muestren cómo se comporta el dispositivo a lo largo del tiempo, la temperatura, la humedad y el voltaje para afrontar el reto de sustituir el optoacoplador.
Figura 1: Diagrama de bloques de control del motor de comunicaciones aislado.
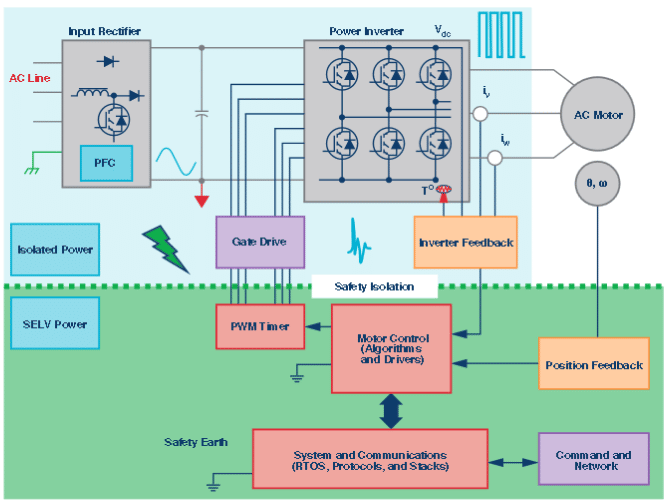
Figura 2. Diagrama de bloques del control y la comunicación del motor aislado.
Medio ambiente
Las condiciones ambientales de las aplicaciones de control de motores pueden tener grandes extremos de temperatura y humedad. El ejemplo de los motores de tracción de trenes puede ilustrar algunos de estos extremos, en este caso en el que el motor de la locomotora puede estar tirando de un tren de vagones cargados por una vía de montaña en un frío día de invierno. La temperatura ambiente podría ser inferior a -40°C y el motor eléctrico podría estar expuesto a este aire exterior, pero entonces el tren podría entrar en un túnel largo, y la temperatura alrededor del motor eléctrico y del motor podría aumentar rápidamente debido al calor del motor. El motor y sus aislantes deben ser capaces de funcionar a estas temperaturas extremas y no tener efectos adversos con el tiempo y la temperatura. Se sabe que el optoacoplador degrada su rendimiento con la temperatura, ya que el LED interno produce menos luz y el detector obtiene menos señal de salida con el tiempo y la temperatura. Cuando se utiliza como aislante multicanal, el optoacoplador presenta un desajuste creciente de los canales con el tiempo. En cambio, el aislador digital no depende de la detección de una señal de un LED interno, y utiliza procesos de circuitos integrados de estado sólido para que los circuitos sean fiables y transmitan y reciban señales digitales a través de la barrera de aislamiento.
Aislador digital
La tecnología de la estructura del aislador digital se ilustra en un ejemplo con el diagrama de bloques de la figura 3. El aislador digital responde a los niveles lógicos de entrada o a los impulsos lógicos, según la arquitectura. Existen diferentes métodos de codificación y decodificación de señales para enviar y recibir datos lógicos a través de la barrera de aislamiento. La técnica de codificación por impulsos, mostrada en la Figura 4, tiene la ventaja de consumir poca corriente de alimentación a bajas velocidades de datos cuando el tiempo entre los impulsos de codificación y decodificación es largo. La técnica de la portadora llamada on-off keying (OOK), mostrada en la Figura 5, consume más corriente a bajas velocidades de datos que el método de codificación de pulsos. Con velocidades de datos más altas (por encima de 10 Mbps)
el método OOK consume menos corriente de alimentación que la técnica de codificación por impulsos. La ventaja de la técnica OOK sobre la técnica de codificación por impulsos es que la técnica OOK tiene una lógica más sencilla, lo que da lugar a un menor retardo de propagación y a una mayor velocidad máxima de datos. El inconveniente de la técnica de codificación por impulsos es que si el ruido externo perturba los datos de salida, puede pasar un microsegundo o más hasta que se corrija internamente el error o aparezca un nuevo flanco de datos. En el caso de la aplicación de control del motor, esto podría significar que los interruptores del controlador de la puerta o las señales de control de retroalimentación podrían estar fuera de control durante un tiempo suficientemente largo como para dañar los circuitos de conmutación o el accionamiento del motor. Con la técnica OOK, si una alteración de los datos es causada por un transitorio de tensión, la alteración puede perturbar la salida de datos sólo durante el breve tiempo en que se produce el ruido, ya que la señal es conducida constantemente. Además, debido a su arquitectura más sencilla, el aislador digital OOK puede diseñarse para ser muy robusto frente al ruido eléctrico generado en una aplicación de control de motores.

Figura 3: Diagrama de bloques del aislador digital.


Figura 5. Aislador digital: arquitectura de datos de codificación on-off
Inmunidad al ruido
El ruido en una aplicación de motor eléctrico grande puede generarse por un cambio de tensión en modo común a través de la barrera de aislamiento cuando los circuitos de conmutación de control del motor crean un cambio de paso en la tensión del puente
los circuitos de conmutación del control del motor crean un cambio de paso en la tensión del puente. La capacidad del aislador de soportar este transitorio de tensión de alta velocidad de giro sin que se produzcan perturbaciones en la salida del aislador se define como inmunidad al transitorio de modo común (CMTI). El CMTI de un optoacoplador
puede no ser muy alta porque tiene elementos receptores muy sensibles que están sujetos a efectos de acoplamiento capacitivo. El acoplamiento capacitivo de un optoacoplador es una estructura de un solo extremo, con un solo camino para la señal y el ruido a través de la barrera de aislamiento. Esto requiere que las frecuencias de la señal estén muy por encima de la frecuencia de ruido prevista, de modo que la capacitancia de la barrera tenga una baja impedancia para la señal y una alta impedancia para el ruido. A las bajas frecuencias de las señales de control del motor, que suelen ser inferiores a 16 kHz, los componentes de alta frecuencia del transitorio de modo común estarán por encima de la frecuencia de la señal y pueden tener suficiente amplitud para perturbar la salida del optoacoplador. Si observamos el caso de un aislador digital basado en un transformador en la Figura 6, el transformador tiene una estructura de entrada diferencial que da a la señal de entrada y al ruido un camino de transmisión diferente, que intrínsecamente tiene una mayor inmunidad al ruido de modo común, sin la limitación de que el optoacoplador tiene que tener frecuencias de señal más altas que las de ruido. La inmunidad al ruido eléctrico mejorada permite un funcionamiento fiable en entornos con mucho ruido. La figura 7 ilustra el ruido de conmutación de las altas tensiones de puente y el rápido dV/dt de un transitorio de modo común al que el aislador digital debe ser inmune durante la conmutación del control del motor. La forma de onda del osciloscopio muestra que para la arquitectura de conmutación de encendido y apagado con aislador digital acoplado al transformador, se produce un transitorio de modo común (CMT) muy rápido de más de 150 kV/μs desde GND2 a GND1 para provocar una perturbación de los datos, y la salida del aislador sólo se perturbaría durante un tiempo muy breve de sólo 3 ns. Para conseguir un CMTI muy alto, el transmisor debe seguir generando una señal portadora diferencial y el receptor debe tener una alta inmunidad a las variaciones de modo común
inmunidad a la variación del modo común de entrada.

Figura 6. Esquema de un aislador digital acoplado a un transformador

Figura 7. El dV/dt transitorio en modo común en aplicaciones de control de motores.
Capacidad de sobrecarga
En las aplicaciones de control de motores pueden producirse transitorios o sobretensiones de alta tensión, y estas sobretensiones pueden tener picos de más de 10.000 V con un tiempo de subida de.
sólo 1,2μs. Los optoacopladores cumplen el requisito de soportar estas sobretensiones gracias a sus gruesas capas de aislamiento interno. Los aislantes digitales que utilizan dióxido de silicio tienen límites en cuanto al grosor del aislamiento sin que la tensión interna provoque grietas. El aislamiento de los aislantes digitales que utilizan poliimida puede mejorar su capacidad de sobretensión, y se ha demostrado que es muy eficaz cuando el aislamiento de poliimida se realiza en varias capas con un grosor total de 30μm. En la figura 8, los resultados de la prueba de sobretensión de la poliamida de 30μm muestran que es muy robusta y puede soportar un pico de ±20kV.

Resumen
La comparación de los aislantes en la Tabla 1 muestra cómo los aislantes digitales han mejorado su rendimiento con respecto a los optoacopladores en los duros entornos de
aplicaciones de motores eléctricos. La inmunidad al ruido (CMTI) de los optoacopladores es de al menos 10 kV/μs, pero el aislador digital tiene una inmunidad varias veces superior
inmunidad a los transitorios de tensión que provocan perturbaciones en el control del motor que el optoacoplador. Mientras que los optoacopladores y sus problemas de envejecimiento de los LEDs suelen estar limitados al funcionamiento a 85°C, los aisladores digitales funcionan a altas temperaturas, hasta 125°C. Este artículo ha mostrado cómo funcionan estos aisladores digitales y cómo sus capacidades avanzadas superan a los optoacopladores en las aplicaciones de control de motores.
Tabla 1. Comparación de aislantes para Aplicación de control de motores
| Optoacoplador Aislador |
Capacitivo Acoplado digitalmente Aislador |
Transformador Acoplado digitalmente Aislador ADuM225N |
|
| Material aislante | Masa de moldeo | Dióxido de silicio | Poliimida |
| Espesor mínimo del aislamiento interno (μm) | 80 | 14 | 25.4 |
| Arquitectura de datos | LED y diodo PIN | Botón de apagado | Tecla de encendido-apagado |
| Inmunidad mínima al modo común transitorio (kV/μs) | 10 | 60 | 75 |
| Aislamiento reforzado contra la sobretensión Tensión VIOSM(V pico) |
8000 | 6250 | 10,000 |
| Temperatura de funcionamiento (°C) | de -40 a +85 | -40 à +125 | -40 à +125 |
Si quieres conocer otros artículos parecidos a El uso de aislantes digitales robustos en los entornos difíciles de los accionamientos de motores eléctricos puedes visitar la categoría Generalidades.
Deja una respuesta
¡Más Contenido!