
Conoce los microcontroladores PIC y su arquitectura con explicación
El PIC es un microcontrolador de interfaz periférica que fue desarrollado en el año 1993 por la empresa General Instruments Microcontrollers. Se controla mediante software y se programa de forma que realice diferentes tareas y controle una línea de generación. Los microcontroladores PIC se utilizan en diferentes aplicaciones nuevas, como teléfonos inteligentes, accesorios de audio y dispositivos médicos avanzados.

Hay muchos PIC disponibles en el mercado, desde el PIC16F84 hasta el PIC16C84. Estos tipos de PIC son PIC flash asequibles. Microchip ha introducido recientemente chips flash de diferentes tipos, como el 16F628, el 16F877 y el 18F452. El 16F877 cuesta el doble de precio que el antiguo 16F84, pero tiene ocho veces más tamaño de código, más RAM y muchos más pines de E/S, una UART, un convertidor A/D y muchas más funciones.
Arquitectura de los microcontroladores PIC
El microcontrolador PIC se basa en la arquitectura RISC. Su arquitectura de memoria sigue el patrón Harvard de memorias separadas para el programa y los datos, con buses separados.
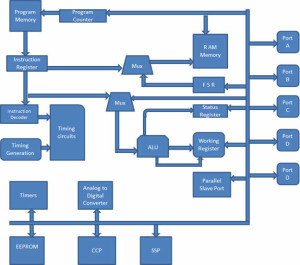
1. Estructura de la memoria
La arquitectura del PIC consta de dos memorias: La memoria de programa y la memoria de datos.
Memoria de programa: Es un espacio de memoria de 4K*14. Se utiliza para almacenar instrucciones de 13 bits o el código de programa. Se accede a los datos de la memoria de programa mediante el registro del contador de programa que contiene la dirección de la memoria de programa. La dirección 0000H se utiliza como espacio de memoria de reinicio y 0004H se utiliza como espacio de memoria de interrupción.
Memoria de datos: La memoria de datos consta de 368 bytes de RAM y 256 bytes de EEPROM. Los 368 bytes de RAM están formados por varios bancos. Cada banco consta de registros de propósito general y registros de funciones especiales.
Los registros de función especial consisten en registros de control para controlar diferentes operaciones de los recursos del chip como temporizadores, convertidores analógico-digitales, puertos serie, puertos de E/S, etc. Por ejemplo, el registro TRISA cuyos bits se pueden cambiar para alterar las operaciones de entrada o salida del puerto A.
Los registros de propósito general consisten en registros que se utilizan para almacenar datos temporales y resultados de procesamiento de los datos. Estos registros de propósito general son cada uno de 8 bits.
Registro de trabajo: Consiste en un espacio de memoria que almacena los operandos de cada instrucción. También almacena los resultados de cada ejecución.
Registro de estado: Los bits del registro de estado denotan el estado de la ALU (unidad aritmética lógica) después de cada ejecución de la instrucción. También se utiliza para seleccionar uno de los 4 bancos de la RAM.
Registro de selección de archivos: Actúa como un puntero a cualquier otro registro de propósito general. Consiste en una dirección de archivo de registro, y se utiliza en el direccionamiento indirecto.
Otro registro de propósito general es el registro del contador de programa, que es un registro de 13 bits. Los 5 bits superiores se utilizan como PCLATH (Program Counter Latch) para funcionar de forma independiente como cualquier otro registro, y los 8 bits inferiores se utilizan como bits del contador de programa. El contador de programa actúa como puntero a las instrucciones almacenadas en la memoria de programa.
EEPROM: Consta de 256 bytes de espacio de memoria. Es una memoria permanente como la ROM, pero su contenido se puede borrar y cambiar durante el funcionamiento del microcontrolador. El contenido de la EEPROM puede leerse o escribirse mediante registros de función especiales como EECON1, EECON, etc.
2. Puertos de E/S
La serie PIC16 consta de cinco puertos, como el puerto A, el puerto B, el puerto C, el puerto D y el puerto E.
Puerto A: Es un puerto de 16 bits, que puede utilizarse como puerto de entrada o de salida en función del estado del registro TRISA.
Puerto B: Es un puerto de 8 bits, que puede utilizarse como puerto de entrada y de salida. 4 de sus bits, cuando se utilizan como entrada, pueden cambiarse al recibir señales de interrupción.
Puerto C: Es un puerto de 8 bits cuyo funcionamiento (entrada o salida) está determinado por el estado del registro TRISC.
Puerto D: Es un puerto de 8 bits, que además de ser un puerto de E/S, actúa como puerto esclavo para conectarse al bus del microprocesador.
Puerto E: Es un puerto de 3 bits que cumple la función adicional de las señales de control al convertidor A/D.
3. Temporizadores
Los microcontroladores PIC constan de 3 temporizadores, de los cuales el Temporizador 0 y el Temporizador 2 son temporizadores de 8 bits y el Tiempo-1 es un temporizador de 16 bits, que también puede utilizarse como contador.
4. Convertidor A/D
El microcontrolador PIC consta de un convertidor analógico-digital de 8 canales y 10 bits. El funcionamiento del convertidor A/D se controla mediante estos registros de función especiales: ADCON0 y ADCON1. Los bits inferiores del convertidor se almacenan en ADRESL (8 bits), y los superiores en el registro ADRESH. Requiere una tensión de referencia analógica de 5V para su funcionamiento.
5. Osciladores
Los osciladores se utilizan para la generación de tiempos. Los microcontroladores PIC disponen de osciladores externos como cristales u osciladores RC. En el caso de los osciladores de cristal, el cristal se conecta entre dos patillas del oscilador, y el valor del condensador conectado a cada patilla determina el modo de funcionamiento del oscilador. Los diferentes modos son el modo de bajo consumo, el modo de cristal y el modo de alta velocidad. En el caso de los osciladores RC, el valor de la Resistencia y el Condensador determina la frecuencia del reloj. La frecuencia del reloj oscila entre 30 kHz y 4 MHz.
6. Módulo CCP:
Un módulo CCP funciona en los tres modos siguientes
Modo de captura: Este modo captura la hora de llegada de una señal, o lo que es lo mismo, captura el valor del Temporizador1 cuando el pin CCP se pone en alto.
Modo de comparación: Actúa como un comparador analógico que genera una salida cuando el valor del temporizador1 alcanza un determinado valor de referencia.
Modo PWM: Proporciona una salida modulada por ancho de pulsos con una resolución de 10 bits y un ciclo de trabajo programable.
Otros periféricos especiales incluyen un temporizador Watchdog que reinicia el microcontrolador en caso de cualquier mal funcionamiento del software y un reinicio Brownout que reinicia el microcontrolador en caso de cualquier fluctuación de energía y otros. Para una mejor comprensión de este microcontrolador PIC, vamos a dar un proyecto práctico que utiliza este controlador para su funcionamiento.
Luz de calle que se ilumina al detectar el movimiento de un vehículo
Este proyecto de control de farolas LED está diseñado para detectar el movimiento de un vehículo en la carretera para encender un bloque de farolas delante de él, y apagar las luces de cola para ahorrar energía. En este proyecto, la programación de un microcontrolador PIC se realiza mediante lenguaje C o ensamblador embebido.
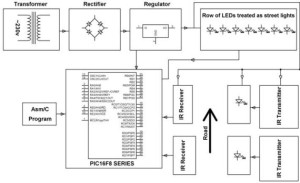
El circuito de alimentación proporciona la energía a todo un circuito mediante la reducción, rectificación, filtrado y regulación de la red eléctrica. Cuando no hay vehículos en la carretera, todas las luces permanecen apagadas para ahorrar energía. Los sensores IR se colocan a ambos lados de la carretera, ya que detectan el movimiento de los vehículos y, a su vez, envían las órdenes al microcontrolador para que encienda o apague los LED. Un bloque de LEDs se encenderá cuando un vehículo se acerque a él y, una vez que el vehículo se aleje de esta ruta, la intensidad se vuelve baja o se apaga por completo.
Los proyectos de microcontroladores PIC pueden utilizarse en diferentes aplicaciones, como periféricos de videojuegos, accesorios de audio, etc. Aparte de esto, para cualquier ayuda relacionada con cualquier proyecto, puedes ponerte en contacto con nosotros a través de la sección de comentarios.
Si quieres conocer otros artículos parecidos a Conoce los microcontroladores PIC y su arquitectura con explicación puedes visitar la categoría Generalidades.
Deja una respuesta
¡Más Contenido!