
Cómo diseñar una buena carcasa de sensor de vibración mediante el análisis modal
Resumen
Una carcasa mecánica bien diseñada para un acelerómetro MEMS
el acelerómetro garantizará la extracción de datos de vibración de alta calidad para el CbM del activo monitorizado
activo vigilado. La carcasa mecánica utilizada para alojar un acelerómetro MEMS debe tener una respuesta en frecuencia mejor que la integrada
ACELERÓMETRO MEMS. Este documento utiliza el análisis modal para proporcionar las frecuencias naturales
posible con los diseños de los altavoces. Se ofrecen consejos sobre el diseño de los sensores de vibración con ejemplos de
se proporciona mediante ejemplos teóricos y la simulación modal de ANSYS. Se demuestra que
que los efectos de la geometría, como la forma del recinto (como el cilindro o el rectángulo) y la altura dominan las frecuencias naturales
se demuestra que los efectos de la geometría, como la forma del recinto (como el cilindro o el rectángulo) y la altura, dominan las frecuencias naturales en el diseño del recinto.
Se proporcionan ejemplos de diseños mecánicos para alojar acelerómetros MEMS de un eje y triaxiales
Acelerómetros MEMS con una frecuencia de resonancia de 21 kHz. Este artículo también
proporciona orientación sobre la integración del epoxi en las carcasas, así como sobre la instalación de los cables y las opciones de montaje de los sensores
este artículo también ofrece orientación sobre la integración del epoxi en las carcasas, así como sobre la instalación de los cables y las opciones de montaje de los sensores.
¿Qué es el análisis modal y por qué es importante?
Se utiliza una carcasa de acero o aluminio para alojar un sensor de vibración MEMS y
proporcionan una fijación segura a los bienes vigilados y resistencia al agua y al polvo
(IP67). Una carcasa metálica bien diseñada garantizará que los datos de las vibraciones sean de alta calidad
medido desde el activo. El diseño de una buena envolvente mecánica requiere una comprensión de los modos
comprensión del análisis modal.
El análisis modal se utiliza para comprender las características de vibración de las estructuras.
El análisis modal proporciona las frecuencias naturales y los modos normales (deformación relativa
deformación) de un diseño. La principal preocupación del análisis modal es evitar
resonancia, en la que las frecuencias naturales de un diseño estructural coinciden estrechamente con las del
la de la carga vibratoria aplicada. Para los transductores de vibraciones, las frecuencias naturales del recinto deben ser mayores que las de la carga
en el caso de los sensores de vibración, las frecuencias naturales del recinto deben ser superiores a las de la carga vibratoria aplicada y medida por el sensor MEMS
el sensor MEMS
El gráfico de la respuesta en frecuencia del acelerómetro MEMS ADXL1002 se muestra en la figura 1
figura 1. El ancho de banda a 3 dB del ADXL1002 es de 11 kHz, y su frecuencia de resonancia es de 21 kHz
frecuencia de resonancia de 21 kHz. El recinto de protección utilizado para albergar el ADXL1002 debe tener una primera frecuencia natural de 21 kHz o más
frecuencia natural de 21 kHz o superior.

Figura 1. Respuesta en frecuencia del acelerómetro MEMS ADXL1002.
Modelo de carcasa del sensor de vibración
Para el análisis modal y el diseño, un sensor de vibraciones puede considerarse como un cilindro de viga en voladizo corto y grueso,
cilindro de viga en voladizo. Además, la ecuación de vibración de Timoshenko
la ecuación de vibración se utilizará para la simulación. Lo discutiremos con más detalle más adelante en la
artículo. Un cilindro grueso, corto y en voladizo es similar a un sensor de vibración
montados en equipos industriales, como se muestra en la figura 2. El sensor de vibración es
el transductor de vibraciones se fija al equipo industrial mediante un montaje de pernos. El montaje de los pernos y la
el diseño de la caja y el montaje de los montantes requieren una cuidadosa caracterización para poder eliminar las resonancias mecánicas
2 Cómo diseñar una buena caja de sensores de vibración mediante el análisis modal
no afectan a las frecuencias de vibración de los MEMS de interés. Métodos de elementos finitos
(FEM) utilizando ANSYS o programas similares puede utilizarse como un solucionador eficiente para la ecuación de vibración de un MEMS
la ecuación de vibración de un cilindro corto y grueso.


Figura 2: Modelización de la carcasa del sensor de vibraciones.
Herramientas de simulación
Para el análisis modal, ANSYS y otras herramientas de simulación asumen un movimiento armónico
para cada punto del diseño. El desplazamiento y la aceleración de todos los puntos
en un diseño se resuelven en valores y vectores propios, en este caso frecuencias naturales y formas modales
frecuencias naturales y formas modales.
Frecuencia natural y forma modal
La matriz de masa M, la matriz de rigidez K y la frecuencia angular ωiy la forma del modo
{Φi} se relacionan mediante la ecuación 1, que se utiliza en programas de MEF como ANSYS.1
El sitio
frecuencia natural fi
se calcula dividiendo ωi
por 2π, y la forma del modo {Φi}
proporciona los patrones de deformación relativa del material a determinadas frecuencias naturales
frecuencias.

Para un sistema de un solo grado de libertad, la frecuencia se expresa simplemente como :

La ecuación 2 proporciona una forma sencilla e intuitiva de evaluar un diseño. Cuando reduzcas la altura del
la altura del recinto del transductor, la rigidez aumenta y la masa
por tanto, la frecuencia natural aumenta. Del mismo modo, cuando aumentas la altura del
del mismo modo, cuando aumentas la altura del recinto, la rigidez disminuye y la masa aumenta, lo que da lugar a una frecuencia natural más baja
una frecuencia natural más baja.
La mayoría de los diseños tienen varios grados de libertad. Algunos diseños tienen cientos.
El uso del MEF permite un cálculo rápido de la ecuación 1, que sería muy
muy lento de hacer a mano.
Factor de participación del modo
El Factor de Participación Modal (FPM) se utiliza para determinar qué modos y frecuencias naturales son más importantes para tu diseño
las frecuencias naturales son las más importantes para tu diseño. La forma del modo
{Φi}, la matriz de masa M y el vector de dirección de la excitación D están relacionados por la ecuación 31
resolviendo el MPF. El cuadrado del factor de participación es la masa efectiva.

El MPF y la masa efectiva miden la cantidad de masa que se mueve en cada dirección para cada modo
dirección para cada modo. Un valor alto en una dirección significa que el modo será
excitado por fuerzas, como las vibraciones, en esa dirección.
El uso del MPF junto con la frecuencia natural permitirá al diseñador
identificar posibles problemas de diseño. Por ejemplo, la frecuencia natural más baja
por ejemplo, la frecuencia natural más baja producida por un análisis modal puede no ser el mayor problema de diseño, ya que puede
de hecho, puede no tener un factor de participación tan grande en la dirección de interés (plano del eje x, y o z) como las otras frecuencias
plano del eje z) en comparación con todos los demás modos
Los ejemplos de la Tabla 1 ilustran que, aunque en la simulación se prevea una frecuencia natural de 500 Hz para el
previsto en la simulación para el eje x, el modo está débilmente excitado y es poco probable que suponga un problema
ser un problema. Un modo fuerte de 800 Hz se excita en el eje x del recinto y
ser un problema si el eje sensible del MEMS está orientado en el eje x del altavoz.
Sin embargo, este fuerte modo de 800 Hz en el eje x no es interesante si el diseñador tiene
su transductor MEMS PCB orientado para medir en el eje z de la caja.
| Modo | Frecuencia (Hz) | Eje | MPF | Comentario del MPF |
| 1 | 500 | X | 0.001 | Modo bajo |
| 2 | 800 | X | 0.45 | Modo alto |
| 3 | 1500 | Y | 0.6 | Modo alto |
| 4 | 3000 | Y | 0.002 | Modo bajo |
| 5 | 10,000 | Z | 0.33 | Modo alto |
Interpretación de los resultados del análisis modal
Por el apartado anterior, sabemos que el análisis modal te dirá cuáles son las
frecuencias en tu eje de interés. Además, el MPF permitirá
el diseñador para decidir si una frecuencia puede ser ignorada en un diseño. Para completar
la interpretación del análisis modal, es importante entender que todos los puntos de una estructura
en una estructura vibran a la misma frecuencia (variable global), pero la amplitud
de la vibración (o forma modal) en cada punto es diferente. Por ejemplo, una frecuencia de 18 kHz
puede afectar más a la parte superior de la caja mecánica que a la inferior.
La forma del modo (variable local) tiene una amplitud más fuerte en la parte superior de la caja mecánica que en la inferior, como se muestra en la tabla siguiente
esto significa que mientras la parte superior de la estructura del recinto se excita fuertemente con una frecuencia de 18 kHz, la parte inferior del recinto no
El sensor MEMS de la parte inferior de la caja también se verá afectado por esta frecuencia,
aunque en menor medida.


Figura 3: Frecuencia natural de una carcasa de sensor de vibraciones, forma modal en el eje de interés y amplitud relativa en la parte superior e inferior de la carcasa.
Ecuación diferencial vibratoria de Timoshenko
La ecuación de Timoshenko es adecuada para modelar vigas gruesas y cortas o vigas
vigas sometidas a vibraciones de varios kilohercios. Un transductor de vibraciones, como se muestra en la figura 2, es
análoga a una sección transversal cilíndrica corta y gruesa, que puede ser modelada mediante el método de Timoshenko
la ecuación de Timoshenko. Esta ecuación es una ecuación diferencial de cuarto orden
con soluciones analíticas para casos restringidos. El MEF, tal como se presenta en las ecuaciones 1
a la ecuación 3, ofrece el método más conveniente para resolver la ecuación de Timoshenko
ecuación de Timoshenko mediante matrices multidimensionales, que se escalan con el número de grados de libertad del diseño
grados de libertad del diseño.
Ecuación maestra
Aunque el MEF ofrece considerables ventajas para resolver la ecuación de Timoshenko de
vibración de manera eficiente, comprendiendo las compensaciones en el diseño de un
una caja de sensores de vibración requiere un examen más detallado de la ecuación 42
parámetros.

El uso de diferentes materiales o geometrías afectará a la frecuencia natural (ω) del
la estructura diseñada.
Dependencias del material y la geometría
Los parámetros de la ecuación de Timoshenko pueden agruparse en dos categorías: los que dependen de la geometría y los que dependen del material
o dependiente del material.
Las dependencias materiales son:
- Módulo de Young (E): es una medida de la elasticidad de un material, es decir, la cantidad de fuerza de tracción necesaria para deformarlo
cuánta fuerza de tracción se necesita para deformarlo. Una fuerza de deformación por tracción
se produce en ángulo recto con respecto a una superficie. - Módulo de cizallamiento (G): es una medida de la rigidez al cizallamiento de un material - el
capacidad de un objeto para resistir una fuerza de deformación por cizallamiento cuando se aplica en paralelo a una superficie
paralelo a una superficie. - Densidad del material (ρ): masa por unidad de volumen.
Las dependencias de la geometría son:
- Coeficiente de cizallamiento (k): mientras que el cizallamiento es una propiedad del material, el coeficiente de cizallamiento
representa la variación del esfuerzo cortante en una sección transversal. Este coeficiente es
este coeficiente es generalmente igual a 5/6 para una sección rectangular y 9/10 para una sección circular. - Momento de inercia de la superficie (I): propiedad geométrica de una superficie que refleja
cómo se distribuye la geometría alrededor de un eje. Esta propiedad da
una visión de la resistencia de una estructura a la flexión debido a un momento aplicado. En
análisis modal, se puede considerar como resistencia a la deformación. - Área de la sección transversal (A): el área de la sección transversal de una forma definida,
como un cilindro
La ecuación de Timoshenko predice una frecuencia crítica, fCdada por la ecuación 5.3
Como la ecuación 4 es de cuarto orden, hay cuatro soluciones independientes por debajo de fC. Para
análisis, ecuación 5 fC es útil para comparar diferentes recintos
geometrías y materiales.

Existen diversos enfoques y soluciones para determinar todas las frecuencias por debajo de fC. En "Vibraciones libres y forzadas de
Vigas de Timoshenko descritas por la ecuación de la diferencia simple"3
y "Flexión
Vibración de los ejes de las hélices mediante la técnica de modelización distribuida de los terrones "4
Estos enfoques implican matrices multidimensionales, como el MEF
¿Qué material debo utilizar para mi diseño?
La tabla 2 detalla algunos materiales metálicos industriales comunes, como el acero inoxidable
acero inoxidable y aluminio.
| Material | E (N/m2) | G (N/m2) | ρ (kg/m3) | por kg |
| Acero inoxidable | 2E11 | 7.7E10 | 7850 | 0.11 |
| Cooper | 1.1E11 | 4.5E10 | 8300 | 9.06 |
| Aluminio | 7.1E10 | 2.4E10 | 2770 | 2.18 |
| Titanio | 9.6E10 | 3.6E10 | 4620 | 25 |
El cobre es el más pesado de los cuatro materiales mencionados, y no ofrece ninguna ventaja
ventaja sobre el acero inoxidable, que es más ligero, más fuerte y más barato.
El aluminio es una buena opción para aplicaciones sensibles al peso. Su densidad es del 66
inferior a la del acero. La desventaja es que el aluminio cuesta 20 veces más que el acero por kilo.
El acero es la elección obvia para las aplicaciones sensibles a los costes.
Aunque el titanio es aproximadamente dos tercios más pesado que el aluminio, su resistencia inherente
la fuerza inherente significa que necesitas menos. Sin embargo, el uso de titanio es prohibitivo
para todas las aplicaciones, salvo las más especializadas, de ahorro de peso.
Ejemplo de simulación
La figura 4 muestra el diseño de una caja metálica rectangular para el sensor de vibraciones, con
40 mm de alto y 43 mm de largo por 37 mm de ancho. Para el análisis modal, la superficie inferior
(z, x) es una tensión fija.


Figura 4: Recinto rectangular con el tipo de material modificado para el estudio de simulación.
La figura 5 muestra los resultados del análisis modal del MEF para diferentes materiales de la caja.
La primera frecuencia natural con un MPF significativo (mayor que 0,1 para la relación
de la masa efectiva a la masa total del sistema) se traza en función del tipo de material.
Está claro que el aluminio y el acero inoxidable tienen la primera frecuencia natural significativa más alta
frecuencia natural más alta. También son buenas opciones de material para aplicaciones de bajo coste o bajo peso
aplicaciones de bajo peso.


Figura 5: Recinto rectangular con tipo de material y primera frecuencia natural significativa (Hz).
¿Debo diseñar un recinto rectangular o cilíndrico?
¿Cilíndrico?
La figura 6 muestra una extrusión hueca rectangular y cilíndrica de acero inoxidable,
con un grosor de pared de 2 mm y una altura de 40 mm. El diámetro exterior del cilindro
es de 43 mm, y la parte rectangular también mide 43 mm en los ejes x e y.


Figura 6. Formas rectangulares y cilíndricas similares para el estudio del diseño modal.
Para el análisis modal, toda el área de la pared de 2 mm (o sección transversal x, y) es
una tensión fija. La figura 7 muestra los resultados del análisis modal del MEF. La primera frecuencia natural
frecuencia natural con un MPF significativo (superior a 0,1 para la relación de la masa efectiva
a la masa total del sistema) se muestra en función de la forma del material. La forma cilíndrica
tiene la primera frecuencia natural más significativa para los ejes x e y, con un rendimiento similar en la dirección z
rendimiento similar en la dirección z.


Figura 7. Primera frecuencia natural significativa (Hz) para formas rectangulares y cilíndricas similares.
Geometría - Superficie e Inercia
La ecuación 4 incluye las dependencias materiales y geométricas. Como tanto las piezas rectangulares como las cilíndricas se simularon con parámetros de acero inoxidable, el
sólo la geometría explica el mejor rendimiento de la pieza cilíndrica. Figura 8
ilustra la sección transversal del cilindro y el rectángulo para el cálculo del área
momento de inercia y sección transversal de las piezas.


Figura 8. Momento de inercia de la superficie (IYY) y el área de la sección transversal.
El momento de inercia de la superficie, IYYdel rectángulo es casi un 50% mayor que la del cilindro
la del cilindro, como se muestra en la Tabla 3. El rectángulo es más resistente a
deformación. Sin embargo, el área de la sección transversal, A, del cilindro es tres veces mayor que la del
mayor que la del rectángulo. Un parámetro A mayor significa una tensión fija mayor
tanto en la simulación como en la realidad, el cilindro está mejor diseñado para una mayor
rigidez o mayor rigidez.
Utilizando los valores de la Tabla 3 y la Ecuación 5, la frecuencia crítica es de 60,74 kHz para el cilindro y de 26,56 kHz para el rectángulo
cilindro y 26,56 kHz para el rectángulo. La ecuación 5 es una herramienta útil para mostrar el rendimiento relativo de
el rendimiento relativo de las distintas geometrías. Las ecuaciones 4 y 5 predicen cuatro tipos de valores independientes
soluciones independientes por debajo de la frecuencia crítica. La tabla 4 resume el MEF
resultados y confirma los cuatro primeros modos significativos.
| Forma | IYY (m4) | G (N/m2) | ρ (kg/m3) | A (m2) |
| Cilindro | 6.24E-8 | 7.7E10 | 7850 | 1.03E-3 |
| Rectángulo | 9.21E-8 | 7.7E10 | 7850 | 0.33E-3 |
| Modo | Cilindro (Hz) | Rectángulo (Hz) |
| 1 | 11,890 | 5030.4 |
| 2 | 30,077 | 10,559 |
| 3 | 40,506 | 14,270 |
| 4 | 50,777 | 15,750 |
|
Gras = factor de participación del modo > 0,1 Paso en negrita = 0,01 < factor de participación del modo < 0,1 |
||
¿Cuál es la altura máxima recomendada para
¿Mi sensor?
Las ecuaciones 4 y 5 son útiles, pero no proporcionan una orientación analítica sobre la
la compensación entre la altura vertical del recinto y la primera frecuencia natural significativa
frecuencia natural. A partir de la ecuación 2, podemos ver intuitivamente que cuanto más alto sea el
cuanto mayor sea el recinto del sensor, menor será la primera frecuencia natural.
Limitaciones de los modelos analíticos
Las ecuaciones 4 y 5 suponen que la anchura de la sección transversal de una viga es al menos el 15% de la longitud de la misma
de la longitud de la viga.5
Otros enfoques para vigas largas y delgadas, como la ecuación de Bernoulli
ecuación de Bernoulli,6
supone que la anchura de la sección transversal de la viga es inferior al 1% de la longitud de la viga
longitud de la viga.5
Para las vigas largas y delgadas, la ecuación 66
se puede utilizar, que incluye
la longitud (L) o la altura del sensor. La ecuación 6 no tiene en cuenta los esfuerzos cortantes, que son importantes para las vigas cortas y gruesas
son importantes para las vigas cortas y gruesas. Para las primeras frecuencias naturales significativas,
en general, hay una buena concordancia entre las ecuaciones 4, 5 y 6 para las formas cilíndricas sólidas. Para las formas huecas, la ecuación 6 subestima la primera frecuencia natural significativa en un 50%
significativo en un 50%.
| cilindro de 30 mm de diámetro | Altura/longitud (mm) | Ecuación 6 (Hz) | Simulación (Hz) |
| Sólido | 60 | 5872 | 5267 |
| Hueco, pared de 2 mm | 60 | 2930 | 5911 |
Ecuación 66
los parámetros incluyen el módulo de Young (E) de rigidez, el diámetro (d),
longitud (o altura), densidad del material utilizado (ρ) y Kn constantes para configuraciones dadas
configuraciones dadas.

Dado que los modelos analíticos no proporcionan indicaciones de tensión en altura para las artesas, los estudios de altura se basan generalmente en los MEF
dado que los modelos analíticos no proporcionan información sobre la tensión en altura de las artesas, los estudios de altura se basan generalmente en los MEF.
Estudio de altura
Para proporcionar una indicación de la degradación del rendimiento con el aumento de la altura del recinto, se simularon los modelos mostrados en la figura 9
altura, se simularon los modelos mostrados en la figura 9.


Figura 9. Estudio de la altura del recinto con una base de 5 mm.
Los perfiles de acero inoxidable incluyen una base de 5 mm, que puede utilizarse para
proporcionar una fijación con tornillos entre la carcasa y el equipo que se vigila (por ejemplo, un motor)
ejemplo, un motor). Aumentar la altura del cilindro de 40 mm a 100 mm
da lugar a una importante reducción de la primera frecuencia natural de 12,5 kHz a 3,3 kHz para el x
y el eje y, como se muestra en la figura 10. El eje z también se reduce de 31,2 kHz a
12.7 kHz. Para los sensores de alto rendimiento, está claro que la altura de la caja
debe reducirse al mínimo.


Figura 10. Primera frecuencia natural significativa (Hz) del recinto con una base de 5 mm y una altura mayor.
¿Cuál es el efecto de reducir el grosor o el diámetro de la pared del recinto?
¿Espesor o diámetro de la caja?
Reducir el grosor de la pared del recinto
La tabla 6 muestra las propiedades geométricas y de los materiales si el cilindro de la figura 6 es
se ha reducido el grosor de la pared de 2 mm a 1 mm, pero mantiene una altura de 40 mm y un diámetro exterior de 43 mm
diámetro exterior de 43 mm.
| Forma | IYY (m4) | G (N/m2) | ρ (kg/m3) | A (m2) |
| Cilindro, pared de 2 mm | 6.24E-8 | 7.7E10 | 7850 | 1.03E-3 |
| Cilindro, pared de 1 mm | 3.12E-8 | 7.7E10 | 7850 | 5.28E-4 |
Utilizando los valores de la Tabla 6 y la Ecuación 5, la frecuencia crítica es de 60,74 kHz para el cilindro de 2 mm de espesor de pared y de 61,48 kHz para el cilindro de 1 mm de espesor de pared
cilindro de 2 mm de espesor de pared y 61,48 kHz para el cilindro de 1 mm de espesor de pared.
Con ambos IYY y los parámetros A disminuyen aproximadamente un 50%, el numerador y el denominador de
denominador de la ecuación 5 también se ven afectados para el grosor de la pared del cilindro de 1 mm
cilindro. A partir de este cálculo, se supone que ambos cilindros se comportarán
similar en el análisis modal FEM.
En la figura 11, los resultados del MEF para la primera frecuencia natural con un MPF significativo
(superior a 0,1 para la relación entre la masa efectiva y la masa total del sistema) se representa en función del grosor de la pared del cilindro
en función del grosor de la pared del cilindro. El efecto de reducir el grosor de la pared del cilindro
el efecto de la reducción del grosor de la pared del cilindro con respecto a la frecuencia natural es muy pequeño.


Figura 11. Primera frecuencia natural significativa (Hz) para un cilindro con un grosor de pared de 1 mm o 2 mm.
Reducción del diámetro del recinto
Los ejemplos presentados hasta ahora se refieren todos a recintos cilíndricos con un
diámetro exterior de 43 mm. Algunos diseños pueden requerir sólo 30 mm o 26 mm de diámetro exterior
diámetro exterior. La figura 12 muestra el modelo de simulación y la figura 13 muestra el efecto de la variación del diámetro exterior de la carcasa
la figura 13 muestra el efecto de la variación del diámetro exterior de la carcasa.


Figura 12. Estudio del diámetro del recinto.


Figura 13. Primera frecuencia natural significativa en función del diámetro exterior del cilindro.
Al reducir el diámetro del cilindro de 43 mm a 26 mm, las primeras frecuencias naturales de los ejes x e y
las primeras frecuencias naturales del eje Z disminuyen en aproximadamente 1,5 kHz, mientras que la primera frecuencia natural del eje Z
la frecuencia natural del eje aumenta en 1,9 kHz. Al cambiar el diámetro del cilindro, la superficie
momento de inercia (IYY) y el área de la sección transversal (A) disminuyen. LA IYY el parámetro
disminuirá más que el parámetro A.
Al reducir el diámetro de 43 mm a 30 mm, la IYY se reducirá en ⅔, mientras que
a disminuirá en ⅓. De nuevo, refiriéndonos a la ecuación 5, el efecto neto es un
disminución gradual de la primera frecuencia natural. Intuitivamente, reducir el diámetro del cilindro
hará que la estructura sea menos rígida, por lo que es lógico que la frecuencia natural
disminuirá. Sin embargo, mediante la simulación, queda claro que la reducción de la primera frecuencia natural no es dramática
no es dramática, y el cambio de diámetros puede seguir dando lugar a una primera frecuencia natural en el
frecuencia natural en las decenas de kHz.
¿Cambiar la orientación del transductor
¿Aumentará el rendimiento el recinto del sensor?
Las secciones anteriores de este artículo demuestran que el aumento de la altura del cerramiento dará lugar a una reducción de la primera frecuencia natural
también se ha demostrado que el aumento de la altura del cerramiento provoca una reducción de la primera frecuencia natural. También se ha demostrado que
se recomienda el uso de una forma de recinto cilíndrica en lugar de utilizar una forma rectangular
rectangular. Sin embargo, hay algunos casos en los que las formas rectangulares son útiles.
Considera un escenario en el que la caja debe alojar un sensor y un
con una altura definida de 60 mm, y una anchura y un ancho de 43 mm × 37 mm.
Utilizando una forma rectangular y cambiando la orientación de la restricción fija
(accesorio del equipo) puede ayudar a mejorar el rendimiento. El recinto rectangular
la caja rectangular mostrada en la figura 14 tiene varios agujeros de montaje, de modo que la caja
pueden fijarse al equipo en diferentes orientaciones. Si el recinto es
montado en el lado x,z, la altura efectiva de la caja es de 60 mm.
Sin embargo, si la carcasa se monta en el lado y, z, la altura efectiva es de sólo 37 mm
es de sólo 37 mm. Este enfoque puede utilizarse para un recinto rectangular, pero no es factible utilizando la superficie curva
factible utilizando la superficie curva de un cilindro.


Figura 14. Los recintos rectangulares pueden limitarse en los ejes x y z, o en los ejes y y z para reducir la altura.
La figura 15 muestra que al cambiar la orientación del recinto, la primera frecuencia de resonancia del eje x
frecuencia de resonancia del eje puede ser aumentada, y el eje Y es mejor comparado con un cilindro
a un cilindro. La primera frecuencia de resonancia del eje z es más alta para los ejes fijos y, z
en comparación con la orientación fija x,z, con una frecuencia que casi duplica
frecuencia del modo. Sin embargo, el cilindro es, con diferencia, el que mejor funciona en la zona z
frecuencia natural. Una forma rectangular es un buen enfoque para tener un rendimiento similar en tres ejes en comparación con una forma rectangular
rendimiento similar en tres ejes en comparación con una forma cilíndrica.


Figura 15. Primera frecuencia natural significativa en relación con la orientación del cilindro o la forma rectangular.
Sensor MEMS de un eje 11 kHz con 21 kHz
Resonancia
Según los resultados de la simulación y el análisis presentados en este artículo, una carcasa cilíndrica será la mejor para albergar un sensor MEMS ADXL1002 de un solo eje
la caja cilíndrica es la que mejor funciona para alojar un transductor MEMS ADXL1002 de un solo eje
sensor MEMS de un eje con una resonancia de 21 kHz. El eje de sensibilidad del transductor MEMS debe ser
orientado para aprovechar la primera frecuencia natural del recinto cilíndrico
del recinto cilíndrico en el eje z.
Prototipo de caja y concepto de montaje
Los modelos de simulación presentados hasta ahora han excluido las opciones de los conectores y su influencia en las frecuencias naturales del diseño del recinto
su influencia en las frecuencias naturales del diseño del recinto. Figura 16
muestra un conector M12 de 4 hilos, número de pieza TE T4171010004-001. Este
el conector tiene una clasificación IP67 de resistencia al agua y al polvo e incluye un archivo TE .STEP que puede ser fácilmente
que puede integrarse fácilmente en el archivo de diseño del recinto. Este conector
puede utilizarse con cable de M12 a M12, como el TAA545B1411-002 de TE.


Figura 16. Prototipo de recinto.
Un buen montaje mecánico es esencial para garantizar la mejor transferencia de las vibraciones
y para evitar resonancias que puedan afectar al rendimiento. Un buen montaje suele ser
se consigue utilizando un espárrago roscado tanto en la carcasa del transductor como en el equipo que se supervisa. El modelo de acero inoxidable que se muestra en la figura 16 tiene un sólido de 7 mm
base con un orificio roscado de ¼"-28 estándar en la industria para montar el perno de montaje
al equipo que se supervisa.
La carcasa mide 24 mm de diámetro e incluye una base hexagonal de 25 mm
base hexagonal que puede utilizarse para sujetar el sensor en el equipo vigilado. El sitio
la altura de la caja con el conector M12 puede variar entre 48 mm
y 57 mm, dependiendo de las tolerancias de fabricación y del montaje del cableado interno
la altura total de la caja con el conector M12 puede variar entre 48 mm y 57 mm, dependiendo de las tolerancias de fabricación y del montaje del cableado interno o de las opciones de soldadura entre el conector y la placa de circuito impreso MEMS. Por ejemplo, al menos
se requiere una altura mínima de 5 mm si se utiliza una conexión de cable recto entre el
M12 y la placa de circuito impreso MEMS.
La figura 17 muestra un despiece de una posible opción de montaje del
carcasa, el conector M12 y la placa de circuito impreso MEMS. La placa de circuito impreso MEMS se puede montar para
a la pared de la carcasa con tornillos M3, luego se une al conector M12, y finalmente
finalmente, las dos partes de la carcasa pueden soldarse con láser. La placa de circuito impreso es
montado verticalmente como se muestra, con el eje de sensibilidad MEMS ADXL1002
el MEMS está alineado verticalmente con el eje z de la carcasa. El montaje vertical también es
importante desde el punto de vista de la medición del sistema, ya que esta orientación es generalmente
necesarios para medir los fallos de los rodamientos (por ejemplo, las vibraciones radiales) en los motores
medidas) en los motores.


Figura 17. Un posible concepto de montaje para la placa de circuito impreso del sensor MEMS, el conector M12 y la carcasa.
Simulación modal
Antes de la simulación modal, hay que crear un cuerpo sólido utilizando los componentes
que se muestra en la figura 17. Esto proporcionará un modelo de simulación que se ajusta a un modelo ensamblado y soldado
sensor ensamblado y soldado. Debe seleccionarse una malla fina para que el MEF sea preciso
simulación, especialmente para la geometría del conector. El ángulo de la extensión fina
Debe seleccionarse la opción Malla ANSYS central para obtener el mejor rendimiento. Figura 18
muestra la malla del MEF y la deformación relativa de la carcasa después de la simulación.
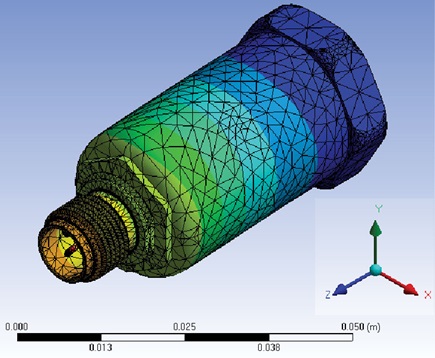
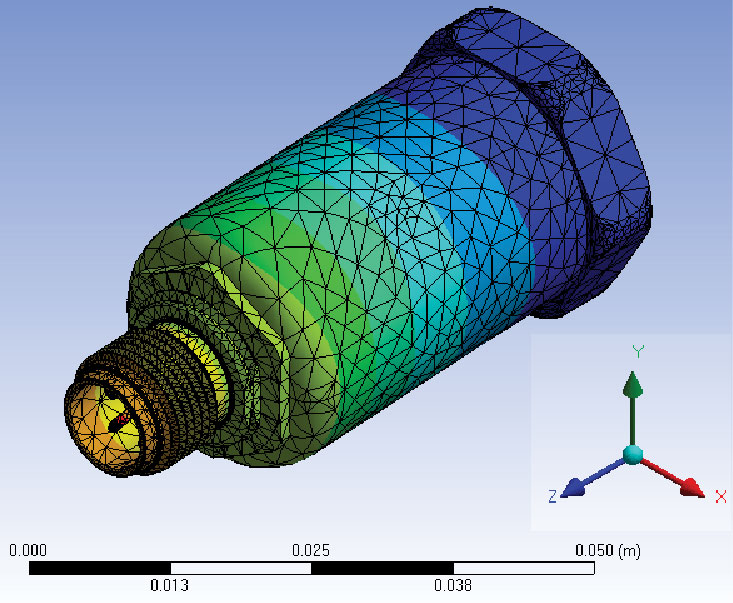
Figura 18. Detalle de la malla del MEF y de la deformación relativa del recinto.
El gradiente progresivo del azul al naranja y al rojo en la figura 18 ilustra la mayor
el gradiente progresivo de azul a naranja y a rojo en la figura 18 ilustra la mayor deformación estructural relativa en la parte superior de la caja y el conector.
Las figuras 19 y 20 muestran los resultados del MEF para la primera frecuencia natural con una gran
MPF (mayor que 0,1 para la relación entre la masa efectiva y la masa total del sistema)
en función de la altura total del sensor para el eje z. El rendimiento del eje z es crítico, con
19.38 kHz para la primera frecuencia natural significativa cuando la altura del recinto es
52 mm. Con una altura total de 48 mm, el rendimiento mejora hasta los 22,44 kHz. A 50 mm
el recinto alto dará un rendimiento de unos 21 kHz.


Figura 19. Primera frecuencia natural significativa (eje z) en función de la altura del recinto.


Figura 20. Primera frecuencia natural significativa en función de la altura del recinto (ejes x, y y z).
Sensor MEMS triaxial de 10 kHz con 21 kHz
Resonancia
Controlar la frecuencia natural de un diseño de paquete de tres ejes es más difícil
tarea que la de un transductor de un solo eje, sobre todo cuando se requiere un rendimiento de 21 kHz
es necesario.
ADcmXL3021
Afortunadamente, Analog Devices ha desarrollado el ADcmXL3021 ±50 g10 kHz,
módulo sensor de vibraciones MEMS triaxial con salida digital, como se muestra en la figura 21. El
El ADcmXL3021 está disponible en un formato de 23,7 mm × 27,0 mm × 12,4 mm
con cuatro bridas de montaje que permiten la instalación con los M2,5 estándar
tornillos. El material de aluminio y la geometría de la carcasa de la ADcmXL3021 soportan
frecuencias de resonancia superiores a 21 kHz en los ejes x, y y z.


Figura 21. ADcmXL3021 Salida digital triaxial MEMS en una carcasa de aluminio con un conector flexible.
Añadir el ADcmXL3021 a una caja con clasificación IP67
Se requiere una carcasa y un conector con clasificación IP67 (a prueba de agua y polvo) para
coloca el ADcmXL3021 en entornos industriales. Además, la salida SPI del
además, la salida SPI del ADcmXL3021 no es adecuada para utilizarla con cables largos. La salida SPI debe
para conducir cables largos, utilizando circuitos transceptores de Ethernet Industrial o RS-485
circuitos transceptores.
Sobre la base de los estudios realizados en este documento, no es posible colocar el ADcmXL3021, el
RS-485 o Ethernet PCB, y un conector en la misma caja y obtener
frecuencias de resonancia de 21 kHz en los tres ejes (x, y y z). La combinación de
componentes dará lugar a un tamaño mínimo de recinto como el mostrado anteriormente en
Figura 2 (40 mm × 43 mm × 37 mm). La figura 2 proporciona una primera frecuencia natural significativa
de aproximadamente 10 kHz a 11 kHz en tres ejes. Además, la Figura 2 fue
no se simula mediante un conector, lo que aumenta la altura efectiva y
reducir aún más las frecuencias naturales.
Si se simula una forma simple de aluminio rectangular mediante el MEF, con dimensiones de 23,7 mm
× 27 mm × 12,4 mm (como el ADcmXL3021) y un grosor de pared de 2 mm,
la primera frecuencia natural significativa supera los 21 kHz en todos los ejes.
Cuando la altura de 12,4 mm se duplica y triplica para dejar espacio a los circuitos adicionales, la frecuencia natural disminuye considerablemente
cuando la altura de 12,4 mm se duplica y triplica para dejar espacio a los circuitos adicionales, la frecuencia natural disminuye considerablemente, como se muestra en la figura 22.
Incluso con sólo 12,4 mm de espacio para los circuitos adicionales, la primera frecuencia natural significativa cae por debajo de los 15 kHz
la frecuencia natural significativa cae por debajo de los 15 kHz.


Figura 22. Aumentar la altura de una forma como la ADcmXL3021.
Un sistema distribuido
En lugar de intentar meter todos los componentes en un recinto rectangular, se sugiere un sistema distribuido como el de la figura 23. Utilizando este concepto, el ADcmXL3021 es
alojado en una caja IP67, con los datos SPI encaminados a una distancia corta (menos de 10 cm) a una caja IP67 separada
(menos de 10 cm) a una caja separada IP67, que aloja las placas de circuito impreso de la interfaz de cables
Placa de circuito impreso con transceptor Ethernet o RS-485 y CI de alimentación asociado
y otros circuitos


Figura 23. El ADcmXL3021 y los circuitos de interfaz están alojados en cajas separadas.
Utilizando este enfoque, la geometría se reduce considerablemente, y el problema de hacer coincidir la
el problema de hacer coincidir la frecuencia natural del altavoz con la del ADcmXL3021 es
mucho más fácil.
Diseño y análisis modal
Como se ha mencionado anteriormente, una forma rectangular es un buen enfoque para conseguir un rendimiento de frecuencia natural similar en tres ejes en comparación con una forma cilíndrica
comportamiento similar de la frecuencia natural en tres ejes en comparación con una forma cilíndrica
forma cilíndrica. En la figura 23, el ADcmXL3021 está colocado en una pequeña caja rectangular hueca
caja rectangular con una pequeña placa de circuito impreso para interconectar el cable flexible ADcmXL3021 con el conector industrial
el conector industrial. Se puede utilizar un conector M8 de perfil pequeño, como el TE 7-1437719-5, con el
utilizado con el modelo. La carcasa rectangular tiene cuatro M2,5
para permitir un montaje fijo en el equipo. El tamaño total de la carcasa es
VISITA ANALOG.COM 11
40.8 mm × 33,1 mm × 18,5 mm. La altura del eje z es de 18,5 mm, lo que es esencial para
permite alcanzar modos de frecuencia más altos.
Los agujeros y, x y cuatro M2,5 de la figura 24 están limitados para la simulación modal.
La dirección z es el eslabón más débil del diseño, incluso a alturas inferiores a 20 mm.
La figura 25 muestra uno de los modos dominantes en la simulación modal del MEF, que ilustra la mayor deformación estructural relativa en la parte superior del recinto.


Figura 24. Caja hueca utilizada para alojar el ADcmXL3021.
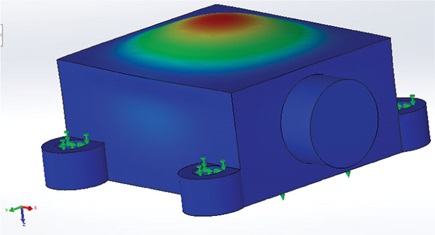
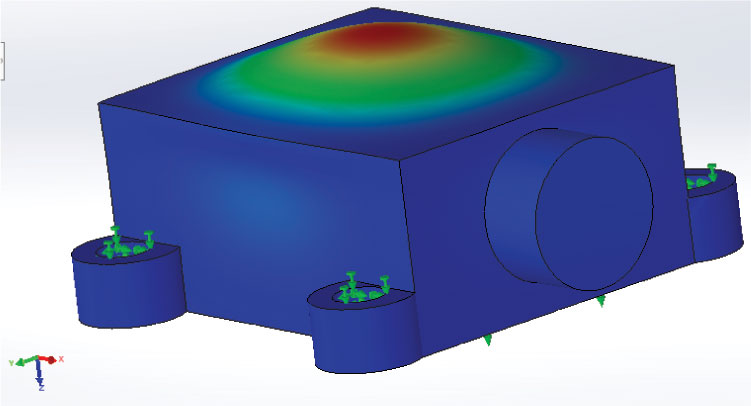
Figura 25. Modo dominante de la simulación para la caja hueca utilizada para albergar el ADcmXL3021.
La rigidez en la dirección z puede aumentar aumentando el grosor de la pared. Para
por ejemplo, si el grosor de la pared es de 2 mm, la primera frecuencia natural significativa en la dirección z es de 14,76 kHz
en la dirección z es de 14,76 kHz. Si se utiliza un grosor de pared de 3 mm, esta frecuencia aumenta a
19.83 kHz. Como se muestra en la figura 26, utilizando un grosor de pared de 3,5 mm se obtiene una frecuencia natural de más de 21 kHz en la dirección z
frecuencia natural de más de 21 kHz en la dirección z.


Figura 26. Primera frecuencia natural significativa en función del grosor de la pared para el eje z.
Adición de epoxi a la carcasa
Se puede añadir epoxi a las carcasas de los sensores de vibración para sujetar las placas de circuito impreso
en una posición fija, y para evitar el movimiento de los conectores y el cableado interno.
Para estudiar los efectos de la resina epoxi en la frecuencia natural de un recinto, se creó un modelo simple de MEF con un
el modelo FEM se creó con un cubo hueco de acero inoxidable de 40 mm × 40 mm
cubo hueco de acero inoxidable con un grosor fijo de 2 mm. El cubo se llenó con 36 mm × 36 mm
de resina epoxi. La altura de la caja se aumentó de 40 mm a 80 mm
a 100 mm, y se realizaron simulaciones alternas con y sin el relleno de epoxi
relleno de epoxi. Las simulaciones del MEF se realizaron con la superficie x, y como tensión fija
tensión fija.
La tabla 7 presenta los resultados de las simulaciones, con algunas conclusiones interesantes:
- Para alturas de transductor menores, y cuando la altura es igual a la longitud/anchura, la resina epoxi aumenta la primera frecuencia natural significativa en el eje del voladizo (z) hasta un 75
el eje del voladizo (z) hasta un 75%. - Cuando la altura del sensor de 80 mm es igual a 2× la longitud/anchura, la primera frecuencia natural significativa en el
la frecuencia natural significativa en el eje del voladizo (z) aumenta un 16% cuando se utiliza un relleno de resina epoxi
relleno de resina epoxi. Sin embargo, los ejes radiales x e y disminuyen un 10%. - A medida que la altura aumenta hasta 3× de la longitud/anchura, la resina epoxi reduce la primera frecuencia natural significativa
frecuencia natural significativa.
| Altura (mm) | ¿Relleno de epoxi? | Frecuencia X (Hz) | Frecuencia Y (Hz) | Frecuencia Z (Hz) |
| 40 | No | 8547 | 8450 | 9291 |
| 40 | Sí | 8586 | 8585 | 16,259 |
| 80 | No | 3943 | 3943 | 9716 |
| 80 | Sí | 3567 | 3530 | 11,272 |
| 120 | No | 2208 | 2208 | 9293 |
| 120 | Sí | 1906 | 1906 | 8045 |
A medida que aumenta la altura, aumenta la masa y disminuye la rigidez. En un momento dado
punto, el aumento de la masa influye más que la rigidez del epoxi añadido.
Para el ejemplo de simulación dado, este punto de inflexión está a más de 80 mm.
Sin embargo, la mayoría de los colectores suelen tener menos de 80 mm de altura. Por lo tanto, se puede concluir que en la mayoría de los casos
por lo tanto, puede concluirse que, en la mayoría de los casos, la adición de resina epoxi mejorará el rendimiento de la frecuencia natural de una solución de carcasa de sensor de vibración
para una solución de carcasa de sensor de vibración.
Simulación de cable externo
Después de montar un transductor de vibraciones en la superficie de una máquina, el cable debe ser
anclados para reducir las tensiones en los extremos del cable y evitar señales falsas
debido a la vibración del cable. Al fijar el cable, deja suficiente holgura para permitir el libre movimiento del acelerómetro
movimiento del acelerómetro.7
Esta sección simula el efecto de un cable vibrante en la respuesta del sistema y
esta sección simula el efecto de un cable que vibra en la respuesta del sistema y proporciona una orientación sobre dónde debe apretarse el cable (a qué longitud de cable).
Se creó un modelo de simulación, con las propiedades del material que se muestran en
Figura 27. TE proporciona modelos de conectores y cables, como el TAA545B1411-002,
que puede utilizarse como referencia. El conector del cable es de nylon
(Nylon 6/6), con cable de cobre y aislamiento de PVC. El sensor adjunto es
de acero inoxidable y relleno de resina epoxi. El modelo de simulación
el modelo de simulación se apoya en una restricción fija en la fijación del sensor, y el cable de 0,15 m es
el modelo de simulación se apoya en una restricción fija en el montaje del transductor, y el cable de 0,15 m es libre de vibrar en toda su longitud. La longitud del cable de 0,15 m puede ampliarse hasta 1 m
para la simulación.
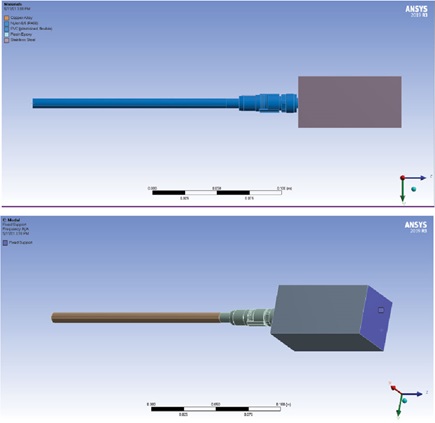
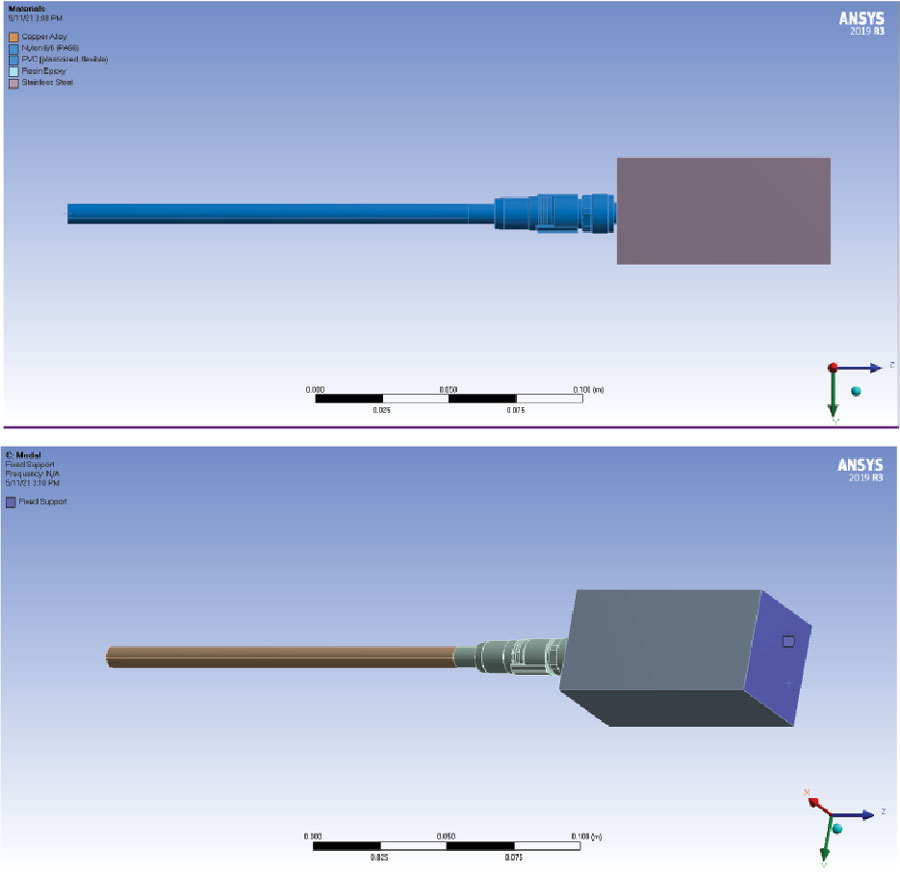
Figura 27. Modelo de cable y sensor con propiedades de material y una longitud de cable de 0,15 m.
La tabla 8 muestra los resultados de la simulación, con algunas conclusiones clave:
- Si el cable se fija a una longitud inferior a 0,15 m, el efecto del cable sobre la respuesta en frecuencia del sensor de vibración es mínimo
la respuesta en frecuencia del sensor de vibración es mínima. Con o sin
0.15 m de cable, la respuesta en frecuencia del recinto del transductor es superior a 11 kHz. - Si se conecta 1 m de cable al transductor y se deja que se mueva libremente y vibre
si se fija 1 m de cable al transductor y se deja que se mueva libremente y vibre a lo largo de su longitud, la masa añadida del cable dominará la respuesta en frecuencia del sistema
respuesta en frecuencia del sistema. La respuesta en frecuencia del cable de 500 Hz
se convertirá en el modo dominante.
| Longitud del cable (m) | ¿Sensor utilizado en la simulación? | Frecuencia Z (Hz) |
| 1 | Sí | 464 |
| 1 | No | 508 |
| 0.15 | Sí | 11,272 |
| 0.15 | No | 11,568 |
En realidad, es poco probable que vibre todo un cable de 1 m, ya que la vibración será
amortiguado a medida que aumenta la longitud del cable. Sin embargo, este ejemplo de simulación muestra
sin embargo, este ejemplo de simulación muestra que el anclaje a unos 0,15 m es una buena idea para una respuesta precisa del sistema.
Montaje del sensor de vibración
La figura 28 muestra el efecto sobre la resonancia del montaje y la gama de frecuencias típicas utilizables
para las técnicas de montaje de espárragos, adhesivos, almohadillas adhesivas e imanes planos
técnicas que se muestran en la Figura 29. El montaje con pernos y adhesivos coloca el transductor lo más cerca posible de la máquina, con el mejor acoplamiento posible de la resonancia
máquina, con el mejor acoplamiento de la señal de vibración de la máquina al
Sensor MEMS. El uso de un dispositivo de montaje con una almohadilla de montaje adhesiva coloca material metálico adicional entre la máquina y el sensor
material metálico adicional entre la máquina y el sensor. Este material adicional
este material adicional amortigua la respuesta en frecuencia de la solución del sensor. El montaje del imán plano
también atenúa la respuesta en frecuencia y no proporciona una fijación tan buena al equipo como otros métodos
la fijación del imán plano también atenúa la respuesta en frecuencia y no proporciona una fijación tan buena al equipo como otros métodos.
La figura 28 sólo proporciona unas directrices típicas, y cada transductor debe caracterizarse mediante mediciones o simulaciones de laboratorio.


Figura 28. Efecto de la técnica de montaje en la resonancia del sensor.


Figura 29. Técnicas de montaje de los sensores de vibración.
La simulación del montaje de los espárragos con el análisis modal de ANSYS se realiza utilizando el
tensión de contacto por defecto. En este caso, la parte inferior del sensor de vibración
sensor de vibración -y, en particular, el orificio de montaje de ¼"-28 pulgadas- se designa como
restricción fija mediante ANSYS. El tipo de restricción es un contacto adherido o atornillado por defecto
conexión.
La simulación del contacto adhesivo es un tema avanzado y requiere ANSYS
la modelización de la zona cohesiva (CZM) y la comprensión de la mecánica del contacto. Para
precisión, ANSYS CZM requiere la introducción de parámetros basados en datos de pruebas de laboratorio.
Por ejemplo, el documento "Medición directa de la ley de cohesión de los adhesivos mediante la técnica del doble voladizo rígido"8
pueden utilizarse como entradas para ANSYS.
Si no puedes encontrar datos experimentales publicados para el adhesivo que has elegido, entonces
tendrás que hacer mediciones de laboratorio. Además, la formulación de contacto correcta
la formulación de los contactos debe configurarse en ANSYS, siguiendo los consejos proporcionados en
cursos como Temas básicos de contacto.9
Por último, el CZM y las técnicas modales
técnicas deben combinarse en el banco de trabajo de ANSYS.
ANSYS Maxwell10 puede utilizarse para simular campos magnéticos. Sin embargo, como las fuerzas magnéticas
son fuerzas sin contacto (empujan o tiran de los objetos sin contacto "sólido"),
generar una tensión de contacto adecuada para el análisis modal numérico no es posible
no es posible. El análisis modal puede realizarse con contactos unidos y sin fricción,
contactos de fricción y de no separación. También puede ser posible el contacto con el CZM, como se ha mencionado anteriormente
mencionada anteriormente.
Conclusión
Un buen diseño de la carcasa mecánica de un acelerómetro MEMS garantizará que
se extraen datos de vibración de alta calidad para el CbM del activo monitorizado.
El diseño de una buena carcasa mecánica para los acelerómetros MEMS requiere un
comprensión del análisis modal. El análisis modal proporciona las frecuencias naturales
en el eje de interés para un recinto de sensores de vibración. Además, el factor de participación modal
el factor de participación (MPF) permitirá al diseñador decidir si una frecuencia puede ser ignorada en un diseño
ignorado en un diseño.
Tanto las características del material como la geometría deben tenerse en cuenta a la hora de diseñar
una caja de sensores de vibración para alcanzar los objetivos de frecuencia natural. La altura del recinto
debe minimizarse para conseguir frecuencias naturales más altas. Reducir el grosor de las paredes
el grosor de la pared o el diámetro del recinto tiene efectos secundarios en las frecuencias naturales del recinto
frecuencias naturales del altavoz.
Las formas cilíndricas de mayor sección están mejor diseñadas para obtener una mayor rigidez y frecuencias naturales más altas en todos los ejes
rigidez y mayores frecuencias naturales en todos los ejes, en comparación con las formas rectangulares
formas rectangulares. Las formas rectangulares ofrecen más opciones para la orientación de los sensores y el equipamiento
equipo, en comparación con las formas cilíndricas. Las formas rectangulares son útiles para
las formas rectangulares son útiles para mantener un comportamiento similar de la frecuencia natural en tres ejes.
En la mayoría de los casos, la adición de resina epoxi mejorará el rendimiento de la frecuencia natural
para una solución de carcasa de sensor de vibración. El uso de montaje de espárragos o adhesivo
proporciona el mejor rango de frecuencia utilizable para un sensor de vibración, mientras que el uso de
el uso de almohadillas magnéticas o adhesivas reduce el rendimiento del sensor.
Referencias
1Curso de innovación de ANSYS: Análisis Modal. ANSYS, 2021
2 Stephen Timoshenko Problemas de vibración en la ingeniería, 4th edición. John Wiley
y Sons Inc, Nueva York, 1974.
3 Leszek Majkut. "Vibraciones libres y forzadas de las vigas de Timoshenko descritas por
La ecuación de la diferencia única" Revista de Mecánica Teórica y Aplicada,
Vol. 47, nº 1, enero de 2009.
4 Mohammad Hossein Abolbashari, Somayeh Soheili y Anoshirvan Farshidianfar.
"Vibración de flexión de los ejes de las hélices mediante la técnica de modelización de masas distribuidas
Técnica" Los 16th Congreso Internacional sobre Sonido y Vibración, Cracovia, 2009.
5 Saida Hamioud y Salah Khalfallah. "Análisis de elementos espectrales de la vibración libre -
Vibración de la viga Timoshenko" Revista Internacional de Ingeniería, 2018.
6 Olivier A. Bauchau y James I. Craig. Análisis estructural: con aplicaciones a las estructuras aeroespaciales, Springer, 2009.
7TN17: Instalación de sensores de vibraciónwilcoxon Sensing Technologies, 2018.
8 A. Khayer Dastjerdi, E. Tan y F. Barthelat. "Medición directa de la ley de cohesión de los adhesivos mediante la técnica de la viga doble rígida en voladizo."
Sociedad de Mecánica Experimental, mayo de 2013.
9Curso de innovación de ANSYS: Temas fundamentales de contacto. ANSYS, 2021
10Ansys Maxwell: Simulación de campos EM de baja frecuencia. ANSYS, 2021.
Si quieres conocer otros artículos parecidos a Cómo diseñar una buena carcasa de sensor de vibración mediante el análisis modal puedes visitar la categoría Generalidades.
Deja una respuesta
¡Más Contenido!