
Sistema de transmisión flexible en CA - Necesidad, definición y tipos
-
¿Por qué es necesario un sistema flexible de transmisión de CA?
- ¿Qué es el factor de potencia?
- Circuito de prueba del factor de potencia unitario
- ¿Qué es el sistema de transmisión de corriente alterna flexible (FACTS)?
- 4 tipos de controladores FACTS
- 2 Tipos de controladores en serie
- 2 Controladores paralelos
- Un controlador serie-derivación - controlador de flujo de potencia unificado:
- Control de la tensión en estado estacionario con SVC para sistemas de transmisión de CA flexibles
- Sistema flexible de accionamiento de CA con SVC
- Gestión de la potencia del transformador
- Viabilidad técnica:
¿Por qué es necesario un sistema flexible de transmisión de CA?
En un sistema de transmisión de CA convencional, la capacidad de transferir energía de CA está limitada por varios factores, como los límites térmicos, el límite de estabilidad transitoria, el límite de tensión, el límite de corriente de cortocircuito, etc. Estos límites definen la máxima potencia eléctrica que puede transmitirse eficazmente a través de la línea de transmisión sin causar daños a los equipos eléctricos y a las líneas de transmisión. Esto se suele conseguir cambiando la disposición del sistema eléctrico. Sin embargo, esto no es factible y hay otra forma de conseguir la máxima capacidad de transferencia de energía sin hacer cambios en la disposición del sistema eléctrico. Además, con la introducción de dispositivos de impedancia variable, como condensadores e inductores, no se transfiere toda la energía o potencia de la fuente a la carga, sino que una parte se almacena en estos dispositivos como potencia reactiva y se devuelve a la fuente. Por tanto, la cantidad real de energía transferida a la carga o potencia activa es siempre menor que la potencia aparente o potencia neta. Para una transmisión ideal, la potencia activa debe ser igual a la potencia aparente. En otras palabras, el factor de potencia (la relación entre la potencia activa y la potencia aparente) debe ser igual a la unidad. Aquí es donde entra en juego el papel de un sistema flexible de transmisión de CA.
Antes de entrar en los detalles de los FACTS, hablemos brevemente del factor de potencia.
¿Qué es el factor de potencia?
El factor de potencia se define como la relación entre la potencia activa y la potencia aparente del circuito.
Por otro lado, sea cual sea el factor de potencia, la energía generada debe permitir a las máquinas suministrar una tensión y una corriente determinadas. Los generadores deben ser capaces de soportar la tensión y la corriente estimadas de la energía generada. El valor del factor de potencia (FP) está entre 0,0 y 1,0.
Si el factor de potencia es cero, el flujo de corriente es totalmente reactivo y la energía almacenada en la carga vuelve con cada ciclo. Cuando el factor de potencia es 1, toda la corriente suministrada por la fuente es absorbida por la carga. Normalmente, el factor de potencia se expresa como un factor de avance o de retardo con respecto a la tensión.
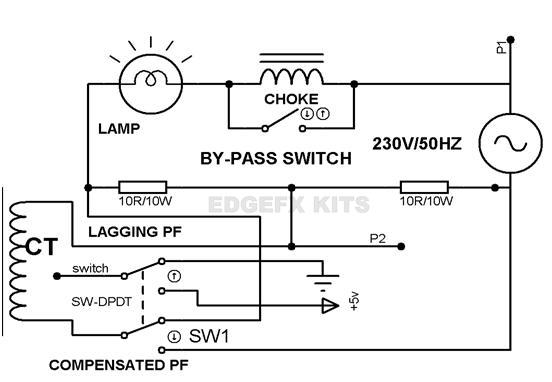
Circuito de prueba del factor de potencia unitario
El circuito con la fuente de alimentación de 230v y un inductor está conectado en serie. Los condensadores deben conectarse en paralelo mediante interruptores SCR para mejorar el factor de potencia. Cuando el interruptor de derivación está desconectado, la inductancia actúa como un inductor y la misma corriente fluye a través de las dos resistencias de 10R/10W. Se utiliza un TC cuyo lado primario está conectado al punto común de las resistencias. El otro punto del TC se conecta a uno de los puntos comunes de un interruptor DPDT S1. Cuando el interruptor DPDT se mueve hacia la izquierda, detecta la caída de tensión proporcional a la corriente para desarrollar una tensión más alta. La caída de tensión es proporcional a la corriente de retardo. Por tanto, la tensión primaria del TC proporciona la corriente de retardo.
Si se utiliza un circuito de control basado en un microcontrolador, éste recibe la referencia de corriente cero y la compara con la referencia de tensión cero para calcular el factor de potencia en función de su diferencia de tiempo. A continuación, en función de la diferencia de tiempo requerida, se encienden varios interruptores SCR, conmutando así más condensadores hasta que el factor de potencia se aproxime a la unidad.
De este modo, dependiendo de la posición del interruptor, se puede detectar la corriente de retardo o la corriente compensada y la pantalla proporciona el tiempo de retardo entre tensiones, la corriente y la visualización del factor de potencia en consecuencia.
¿Qué es el sistema de transmisión de corriente alterna flexible (FACTS)?
Un sistema flexible de transmisión de corriente alterna es un sistema formado por dispositivos electrónicos de potencia junto con dispositivos del sistema para mejorar la controlabilidad y la estabilidad del sistema de transmisión y aumentar la capacidad de transferencia de energía. Con la invención del interruptor tiristor, se allanó el camino para el desarrollo de dispositivos electrónicos de potencia conocidos como controladores de sistemas de transmisión de corriente alterna flexible (FACTS). El sistema FACT se utiliza para proporcionar capacidad de control del lado de alta tensión de la red, incorporando dispositivos electrónicos de potencia para introducir energía inductiva o capacitiva en la red.
4 tipos de controladores FACTS
- Controladores en serie: Los reguladores en serie consisten en condensadores o reactores que introducen la tensión en serie con la línea. Son dispositivos de impedancia variable. Su tarea principal es reducir la inductividad de la línea de transmisión. Suministran o consumen potencia reactiva variable. Ejemplos de reguladores en serie son SSSC, TCSC, TSSC, etc.
- Controladores de derivación: Los reguladores en derivación consisten en dispositivos de impedancia variable, como condensadores o reactores, que introducen la corriente en serie con la línea. Su tarea principal es reducir la capacitancia de la línea de transmisión. La corriente inyectada está en fase con la tensión de línea. Ejemplos de controladores en derivación son STATCOM, TSR, TSC, SVC.
- Controladores de derivación: Estos reguladores introducen la corriente en serie mediante reguladores en serie y la tensión en derivación mediante reguladores en derivación. Un ejemplo es el UPFC.
- Controladores de serie a serieestos reguladores consisten en una combinación de reguladores en serie, cada uno de los cuales proporciona una compensación en serie y una transferencia de potencia real a lo largo de la línea. Un ejemplo es el IPFC.
2 Tipos de controladores en serie
- Condensador en serie controlado por tiristores (TCSC) El condensador en serie controlado por tiristores (TCSC) utiliza rectificadores controlados por silicio para gestionar una batería de condensadores conectada en serie a una línea. Esto permite a la empresa transferir más energía a una línea determinada. Suele estar formado por tiristores en serie con un inductor y conectado a un condensador. Puede funcionar en modo de bloqueo, en el que el tiristor no se activa y la corriente sólo circula por el condensador. Puede funcionar en modo bypass, en el que la corriente se desvía hacia el tiristor y todo el sistema se comporta como una red de impedancia en derivación.
- Compensadores estáticos síncronos en serieel SSSC es simplemente una versión en serie del STATCOM. No se utilizan en aplicaciones comerciales como controladores autónomos. Constan de una fuente de tensión sincrónica en serie con la línea que introduce una tensión de compensación en serie con la línea. Pueden aumentar o disminuir la caída de tensión en la línea.
2 Controladores paralelos
- Compensadores estáticos variablesel compensador estático variable es el más primitivo y la primera generación de controladores FACTS. Este compensador consiste en un interruptor rápido de tiristores que controla una reactancia y/o una batería capacitiva en derivación para proporcionar una compensación dinámica en derivación. Suelen consistir en dispositivos de impedancia variable conectados en derivación, cuya salida puede ajustarse mediante interruptores electrónicos de potencia para introducir una reactancia capacitiva o inductiva en la línea. Pueden colocarse en el centro de la línea para aumentar la capacidad de transferencia de potencia máxima y también pueden colocarse al final de la línea para compensar las variaciones debidas a la carga.
los 3 tipos de SVC son
- TSR (Reactor conmutado por tiristores)consiste en un inductor conectado en derivación cuya impedancia se controla gradualmente mediante un interruptor tiristor. El tiristor sólo se activa en ángulos de 90 y 180 grados.
- TSC (condensador tiristorizado)consiste en un condensador conectado en derivación cuya impedancia es controlada gradualmente por un tiristor. El modo de control con el SCR es idéntico al del TSR.
- TCR (Reactor controlado por tiristores)consiste en un inductor conectado en derivación cuya impedancia se controla mediante el método de retardo del ángulo de encendido del SCR, en el que el encendido del tiristor se controla provocando un cambio de corriente a través del inductor.
- STATCOM (Compensador Síncrono Estático)consiste en una fuente de tensión que puede ser una fuente de corriente continua, un condensador o un inductor, cuya salida puede controlarse con un tiristor.
Un controlador serie-derivación - controlador de flujo de potencia unificado:
Es una combinación de STATCOM y SSSC, ya que ambos se combinan utilizando una fuente de CC común y proporcionan una compensación activa y reactiva de la línea en serie. Controla todos los parámetros de la transmisión de energía de CA.
Control de la tensión en estado estacionario con SVC para sistemas de transmisión de CA flexibles
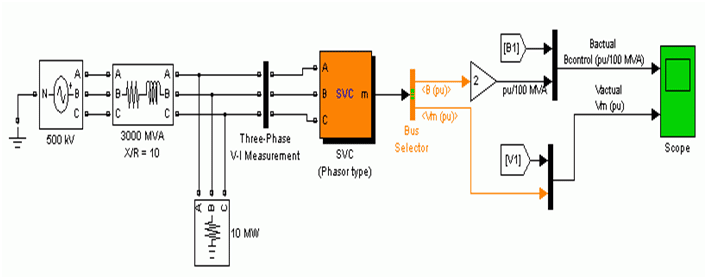
Para generar impulsos de tensión de paso por cero, necesitamos señales de tensión y corriente digitalizadas. La señal de tensión de la red se convierte en corriente continua pulsante mediante un puente rectificador y se envía a un comparador que genera la señal de tensión digital. Asimismo, la señal de corriente se convierte en una señal de tensión tomando la caída de tensión de la corriente de carga a través de una resistencia. Esta señal de corriente alterna se convierte de nuevo en una señal digital como señal de tensión. A continuación, las señales de tensión y corriente digitalizadas se envían al microcontrolador. El microcontrolador calculará la diferencia de tiempo entre los puntos de cruce por cero de la tensión y la corriente, cuya relación es directamente proporcional al factor de potencia y determina el rango en el que se encuentra la potencia. Del mismo modo, utilizando la reactancia del tiristor (TSR), se pueden generar impulsos de tensión de paso por cero para mejorar la estabilidad de la tensión.
Sistema flexible de accionamiento de CA con SVC
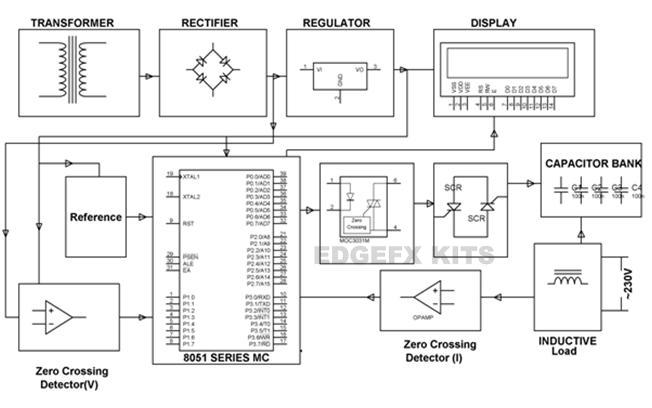
El circuito descrito anteriormente puede utilizarse para mejorar el factor de potencia de las líneas de transmisión mediante un SVC. Utiliza condensadores tiristores conmutados (TSC) basados en una compensación en derivación debidamente controlada por un microcontrolador programado. Es útil para mejorar el factor de potencia. Si se conecta una carga inductiva, el factor de potencia se retrasa debido al retraso de la corriente de carga. Para compensarlo, se conecta un condensador en derivación que absorbe la corriente en el sentido de la tensión de la fuente. El resultado es una mejora del factor de potencia. El intervalo de tiempo entre los pulsos de tensión y corriente cero se genera mediante amplificadores operacionales en modo comparador, que se envían al microcontrolador de la serie 8051.
Con el controlador FACTS se puede controlar la potencia reactiva. La resonancia subsíncrona (SSR) es un fenómeno que puede asociarse a la compensación en serie en determinadas condiciones adversas. El SSR puede eliminarse utilizando controladores FACTS. Las ventajas de los dispositivos FACTS son múltiples: beneficios económicos, mayor calidad de suministro, mayor estabilidad, etc.
Un problema con el sistema de transmisión de CA flexible y una forma de resolverlo
Para la transmisión flexible de CA, a menudo se incorporan dispositivos de estado sólido en los circuitos que se utilizan para mejorar el factor de potencia y aumentar los límites del sistema de transmisión de CA. Sin embargo, un gran inconveniente es que estos dispositivos no son lineales e inducen armónicos en la señal de salida del sistema.
Para eliminar los armónicos creados por la inclusión de dispositivos electrónicos de potencia en el sistema de transmisión de CA, es necesario utilizar filtros activos, que pueden ser filtros de potencia de fuente de corriente o filtros de potencia de fuente de tensión. La primera consiste en hacer que la corriente alterna sea sinusoidal. La técnica consiste en controlar directamente la corriente o la tensión de salida del condensador del filtro. Este es el método de regulación de la tensión o control indirecto de la corriente. Los filtros de potencia activos inyectan una corriente de igual intensidad pero de fase opuesta a la corriente armónica extraída de la carga, de modo que estas dos corrientes se anulan mutuamente y la corriente de la fuente es totalmente sinusoidal. Los filtros de potencia activos incorporan electrónica de potencia para producir componentes de corriente armónica que anulan los componentes de corriente armónica de la señal de salida debidos a las cargas no lineales. Normalmente, los filtros de potencia activos consisten en una combinación de un transistor bipolar de puerta aislada y un diodo alimentado por un condensador de bus de CC. El filtro activo se controla mediante un método de control indirecto de la corriente. El IGBT o Transistor Bipolar de Puerta Aislada es un dispositivo activo bipolar controlado por tensión que incorpora las características del BJT y del MOSFET. En el sistema de accionamiento de CA, un filtro activo en derivación puede eliminar los armónicos, mejorar el factor de potencia y equilibrar las cargas.
Gestión de la potencia del transformador
Planteamiento del problema:
1. La alta tensión crónica suele ser atribuible a una corrección excesiva de la caída de tensión en el sistema de transmisión y distribución de la empresa. La caída de tensión en los conductores eléctricos es una situación común en todas partes. Sin embargo, en lugares con una baja densidad de carga eléctrica, como las zonas suburbanas y rurales, los largos recorridos de los conductores amplifican el problema.
2. La impedancia hace que la tensión caiga a lo largo de un conductor cuando el flujo de corriente aumenta para satisfacer la demanda. Para corregir las caídas de tensión, la compañía eléctrica emplea reguladores de tensión de cambio de carga (OLTC) y reguladores de tensión de compensación de caída de línea (LDC) para aumentar (subir) o disminuir (bajar) la tensión.
3. Los clientes más cercanos a un OLTC o LDC pueden experimentar una sobretensión cuando la compañía eléctrica intenta superar la tensión de caída de la línea para los clientes del extremo de la línea.
4. En muchos lugares, el impacto de la caída de tensión impulsada por la carga se manifiesta en fluctuaciones diarias que hacen que los niveles de tensión sean los más altos en el momento en que la demanda de carga es más baja.
5. Debido a las cargas variables en el tiempo y a la propagación de la no linealidad, entran en el sistema grandes perturbaciones, que también afectan a las líneas de la red eléctrica, lo que hace que todo el sistema sea insalubre.
6. Una causa menos típica de los problemas de alta tensión es la provocada por los transformadores locales que se han ajustado para aumentar la tensión para compensar los niveles de tensión reducidos. Esto suele ocurrir en sistemas con cargas pesadas al final de las líneas de distribución. Cuando las cargas pesadas están en funcionamiento, se mantiene un nivel de tensión normal, pero cuando las cargas se desconectan, los niveles de tensión aumentan.
7. En caso de sucesos extraños, el transformador se quema por sobrecarga y cortocircuito de su bobinado. Además, la temperatura del aceite aumenta debido al incremento de la corriente que circula por los bobinados internos. Esto provoca un aumento inesperado de la tensión, la corriente o la temperatura del transformador de distribución.
8. Los dispositivos eléctricos están diseñados para funcionar a una tensión estándar determinada para que el producto alcance ciertos niveles de rendimiento, eficiencia, seguridad y fiabilidad. El funcionamiento de un aparato eléctrico por encima del nivel de tensión especificado puede causar problemas como averías, paradas, sobrecalentamiento, fallos prematuros, etc. Por ejemplo, una placa de circuito impreso puede tener una vida más corta si se utiliza durante largos períodos por encima de su tensión nominal.

Solución:
- El diseño de un sistema basado en un microcontrolador tiene como objetivo controlar las fluctuaciones de tensión en el lado de entrada/salida del transformador y adquirir datos en tiempo real.
- Desarrollo de un sistema de conmutación automática de transformadores mediante servomotores/paso a paso.
- El sistema debe emitir una alarma en caso de niveles de tensión límite o de emergencia.
- El sistema deberá ser fiable y robusto.
- El sistema puede montarse en transformadores de exterior.
- El diseño de una monitorización continua de la temperatura del aceite de los transformadores de distribución permitirá compararla con los valores nominales y actuar en consecuencia.
- Uso de dispositivos como estabilizadores automáticos de tensión (AVR), estabilizadores de sistema, FACTS, etc. en la red del sistema eléctrico.
Viabilidad técnica:
Sistema de registro de datos basado en un microcontrolador (MDLS):
El MDLS no requiere hardware adicional y permite seleccionar la cantidad de datos y los intervalos de tiempo entre ellos. Los datos recogidos se pueden exportar fácilmente a un PC a través de un puerto serie. El MDLS es muy compacto porque emplea pocos circuitos integrados. El diseño del MDLS que se elija debe cumplir los siguientes requisitos
- Debe ser fácilmente programable.
- El usuario debe poder elegir las velocidades de medición.
- Debe hacer una copia de seguridad de los datos cuando la alimentación del sistema se interrumpe momentáneamente o se elimina por completo.
- Debe ser capaz de exportar datos a un PC a través de un puerto serie.
- Debe ser sencillo y barato.
Espero que hayas entendido el concepto de transmisión flexible de CA del artículo anterior. Si tienes alguna pregunta sobre este concepto o sobre los proyectos eléctricos y electrónicos, déjala en la sección de comentarios más abajo.
Crédito de la foto
Si quieres conocer otros artículos parecidos a Sistema de transmisión flexible en CA - Necesidad, definición y tipos puedes visitar la categoría Generalidades.
Deja una respuesta
¡Más Contenido!