
Qué es un RADAR : fundamentos, tipos y aplicaciones
Podemos observar diferentes objetos alrededor del mundo. Del mismo modo, el radar de detección y alcance se utiliza para ayudar a los pilotos mientras vuelan a través de la niebla, ya que el piloto no puede darse cuenta de por dónde está viajando. El radar utilizado en los aviones es similar a una linterna que funciona con ondas de radio en lugar de luz. El avión transmite una señal de radar intermitente y escucha cualquier indicación de esa señal procedente de objetos cercanos. Una vez que se perciben las indicaciones, el avión identifica que hay algo cerca y utiliza el tiempo que tardan las indicaciones en llegar para descubrir la distancia a la que se encuentra. Este artículo presenta una visión general del radar y su funcionamiento.
¿Quién inventó el radar?
Al igual que ocurre con varios inventos, no es fácil atribuir el mérito del sistema de radar a una persona, ya que fue el resultado de trabajos anteriores sobre las propiedades de la radiación electromagnética para la accesibilidad de numerosos dispositivos electrónicos. La cuestión principal se complica aún más por la ocultación de la intimidad militar bajo la que se examinaron las técnicas de radiolocalización en diferentes países en los primeros días de la Segunda Guerra Mundial.
El autor de esta reseña llegó finalmente a la conclusión de que cuando el sistema de radar es un caso claro de creación directa, la nota de Robert Watson-Watt sobre la Detección y Localización de Aeronaves por Métodos de Radio se publicó inmediatamente hace 50 años. Así que fue la publicación solitaria más significativa en este campo. Los logros británicos en la lucha de Gran Bretaña asignaron mucho a la expansión de un sistema de radar que incluía el crecimiento técnico con la viabilidad operativa.
¿Qué es un sistema de radar?
RADAR significa Sistema de Detección y Alcance por Radio. Básicamente es un sistema electromagnético que se utiliza para detectar la ubicación y la distancia de un objeto desde el punto en el que se coloca el RADAR. Funciona irradiando energía al espacio y controlando el eco o la señal reflejada de los objetos. Funciona en la gama de UHF y microondas.
Un radar es un sensor electromagnético que se utiliza para advertir, seguir, localizar e identificar diferentes objetos que se encuentran a determinadas distancias. El funcionamiento del radar es que transmite energía electromagnética en la dirección de los objetivos para observar los ecos y retornos de los mismos. Aquí los objetivos no son más que barcos, aviones, cuerpos astronómicos, vehículos de motor, naves espaciales, lluvia, pájaros, insectos, etc. Además de observar la ubicación y la velocidad del objetivo, a veces también obtiene su forma y tamaño.
El objetivo principal del radar, en comparación con los dispositivos de detección infrarrojos y ópticos, es descubrir objetivos lejanos en condiciones climáticas difíciles y determinar su distancia, alcance y precisión. El radar tiene su propio transmisor que se conoce como fuente de iluminación para situar los objetivos. Por lo general, funciona en la zona de microondas del espectro electromagnético que se calcula en hercios cuando las frecuencias van de 400 MHz a 40 GHz. Los componentes esenciales que se utilizan en el radar
El radar experimenta un rápido desarrollo durante los años 1930-los años 40 para alcanzar los requisitos de los militares. Todavía se utiliza ampliamente a través de las fuerzas armadas, donde se han creado varios avances tecnológicos. Al mismo tiempo, el radar también se utiliza en aplicaciones civiles, especialmente en el control del tráfico aéreo, la observación del tiempo, la navegación de barcos, el medio ambiente, la detección de zonas remotas, la observación del planeta, la medición de la velocidad en aplicaciones industriales, la vigilancia espacial, la aplicación de la ley, etc.
Principio de funcionamiento
El principio de funcionamiento del radar es muy sencillo, ya que transmite la energía electromagnética y examina la energía devuelta al objetivo. Si las señales devueltas se reciben de nuevo en la posición de su fuente, entonces hay un obstáculo en la vía de transmisión. Éste es el principio de funcionamiento del radar.
Fundamentos del radar
El sistema RADAR consiste generalmente en un transmisor que produce una señal electromagnética que es irradiada al espacio por una antena. Cuando esta señal choca con un objeto, se refleja o se irradia en muchas direcciones. Esta señal reflejada o eco es recibida por la antena del radar, que la envía al receptor, donde se procesa para determinar las estadísticas geográficas del objeto.
El alcance se determina calculando el tiempo que tarda la señal en viajar desde el RADAR hasta el objetivo y viceversa. La localización del objetivo se mide en ángulo, desde la dirección de la señal de eco de máxima amplitud, a la que apunta la antena. Para medir el alcance y la localización de los objetos en movimiento, se utiliza el efecto Doppler.
Las partes esenciales de este sistema son las siguientes
- Un transmisor: Puede ser un amplificador de potencia como un Klystron, un tubo de onda viajera o un oscilador de potencia como un magnetrón. La señal se genera primero con un generador de ondas y luego se amplifica en el amplificador de potencia.
- Guías de onda: Las guías de ondas son líneas de transmisión para la transmisión de las señales del RADAR.
- Antena: La antena utilizada puede ser un reflector parabólico, matrices planas o matrices en fase dirigidas electrónicamente.
- Dúplex: Un duplexor permite utilizar la antena como transmisor o receptor. Puede ser un dispositivo gaseoso que produzca un cortocircuito en la entrada del receptor cuando el transmisor esté funcionando.
- Receptor: Puede ser un receptor superheterodino o cualquier otro receptor que conste de un procesador para procesar la señal y detectarla.
- Decisión de umbral: La salida del receptor se compara con un umbral para detectar la presencia de cualquier objeto. Si la salida está por debajo de cualquier umbral, se asume la presencia de ruido.
¿Cómo utiliza el radar la radio?
Una vez que el radar se coloca en un barco o avión, entonces requiere un conjunto esencial de componentes similares para producir señales de radio, transmitirlas al espacio y recibirlas por algo, y finalmente mostrar la información para entenderla. Un magnetrón es un tipo de dispositivo, utilizado para generar señales de radio que se utilizan a través de la radio. Estas señales son similares a las de la luz porque viajan a la misma velocidad, pero sus señales son mucho más largas y con menos frecuencias.
La longitud de onda de las señales luminosas es de 500 nanómetros, mientras que las señales de radio utilizadas por el radar suelen oscilar entre centímetros y metros. En un espectro electromagnético, tanto las señales de radio como las de luz se realizan con diseños variables de energía magnética y eléctrica a través del aire. El magnetrón del radar genera microondas igual que un horno de microondas. La principal disparidad es que el magnetrón del radar tiene que transmitir las señales a varios kilómetros, en lugar de a pequeñas distancias, por lo que es más potente y mucho más grande.
Cuando se han transmitido las señales de radio, entonces una antena funciona como transmisor para transmitirlas al aire. Generalmente, la forma de la antena está doblada, de modo que concentra principalmente las señales en una señal exacta y estrecha; sin embargo, las antenas de radar también suelen girar, de modo que pueden notar las acciones en un área enorme.
Las señales de radio viajan fuera de la antena con una velocidad de 300.000 km por segundo hasta que chocan con algo y algunas de ellas vuelven a la antena. En un sistema de radar, hay un dispositivo esencial que es el duplexor. Este dispositivo se utiliza para hacer que la antena cambie de lado a lado entre un transmisor y un receptor.
Tipos de radar
Existen diferentes tipos de radares que incluyen los siguientes.
Radar biestático
Este tipo de sistema de radar incluye un transmisor y un receptor que se dividen a través de una distancia equivalente a la del objeto estimado. El transmisor y el receptor están situados en una posición similar, por lo que se denomina radar monástico, mientras que el hardware militar de muy largo alcance superficie-aire y aire-aire utiliza el radar biestático.
Radar Doppler
Es un tipo especial de radar que utiliza el efecto Doppler para generar datos sobre la velocidad de un objetivo a una distancia determinada. Se obtiene transmitiendo señales electromagnéticas en la dirección de un objeto para analizar cómo la acción del objeto ha afectado a la frecuencia de la señal devuelta.
Este cambio dará mediciones muy precisas de la componente radial de la velocidad de un objeto en relación con el radar. Las aplicaciones de estos radares abarcan diferentes sectores como la meteorología, la aviación, la sanidad, etc.
Radar monopulso
Este tipo de sistema de radar compara la señal obtenida con un determinado pulso de radar al lado, contrastando la señal observada en numerosas direcciones, o bien polarizaciones. El tipo más frecuente de radar monopulso es el radar de barrido cónico. Este tipo de radar evalúa el retorno de dos vías para medir directamente la posición del objeto. Es significativo señalar que los radares que se desarrollan en el año 1960 son radares monopulso.
Radar pasivo
Este tipo de radar está diseñado principalmente para detectar y seguir a los objetivos mediante el procesamiento de indicaciones procedentes de la iluminación del entorno. Estas fuentes comprenden las señales de comunicación, así como las emisiones comerciales. La categorización de este radar puede hacerse en la misma categoría del radar biestático.
Radar de instrumentación
Estos radares están diseñados para probar aviones, misiles, cohetes, etc. Proporcionan diferentes informaciones, como el espacio, la posición y el tiempo, tanto en el análisis de post-procesamiento como en tiempo real.
Radares meteorológicos
Se utilizan para detectar la dirección y el tiempo atmosférico mediante señales de radio con polarización circular u horizontal. La elección de la frecuencia del radar meteorológico depende principalmente de un compromiso de rendimiento entre la atenuación y la refección de la precipitación como resultado del vapor de agua atmosférico. Algunos tipos de radares están diseñados principalmente para emplear los desplazamientos Doppler para calcular la velocidad del viento, así como la doble polarización para reconocer los tipos de precipitación.
Radar cartográfico
Estos radares se utilizan principalmente para examinar una amplia zona geográfica para las aplicaciones de teledetección y geografía. Como consecuencia del radar de apertura sintética, se limitan a objetivos bastante estacionarios. Hay algunos sistemas de radar particulares que se utilizan para detectar seres humanos tras las paredes que son más diferentes en comparación con los que se encuentran dentro de los materiales de construcción.
Radares de navegación
En general, son iguales a los radares de búsqueda, pero están disponibles con pequeñas longitudes de onda que son capaces de replicar desde el suelo y desde las piedras. Se utilizan habitualmente en los barcos comerciales y en los aviones de larga distancia. Hay diferentes radares de navegación, como los marinos, que se colocan habitualmente en los barcos para evitar una colisión y con fines de navegación.
RADAR DE PULSO
El RADAR pulsado envía pulsos de alta potencia y alta frecuencia hacia el objeto objetivo. A continuación, espera la señal de eco del objeto antes de enviar otro pulso. El alcance y la resolución del RADAR dependen de la frecuencia de repetición de los pulsos. Utiliza el método de desplazamiento Doppler.
El principio del RADAR que detecta objetos en movimiento utilizando el desplazamiento Doppler se basa en el hecho de que las señales de eco de los objetos estacionarios están en la misma fase y, por tanto, se cancelan, mientras que las señales de eco de los objetos en movimiento tendrán algunos cambios de fase. Estos radares se clasifican en dos tipos.
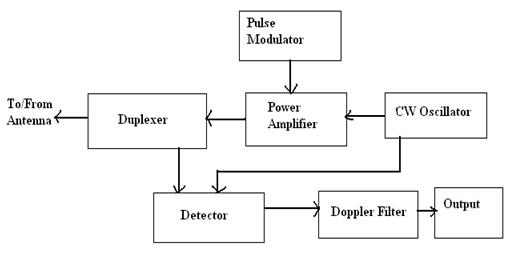
Pulso-Doppler
Transmite una frecuencia de repetición de impulsos elevada para evitar las ambigüedades Doppler. La señal transmitida y la señal de eco recibida se mezclan en un detector para obtener el desplazamiento Doppler y la señal de diferencia se filtra mediante un filtro Doppler en el que se rechazan las señales de ruido no deseadas.
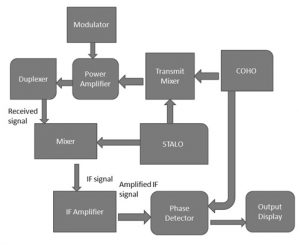
Indicador de objetivo en movimiento
Transmite una frecuencia de repetición de impulsos baja para evitar ambigüedades de alcance. En un sistema RADAR MTI, las señales de eco recibidas del objeto se dirigen hacia el mezclador, donde se mezclan con la señal de un oscilador local estable (STALO) para producir la señal de FI.
Esta señal de FI se amplifica y se entrega al detector de fase, donde se compara su fase con la de la señal del oscilador coherente (COHO) y se produce la señal de diferencia. La señal coherente tiene la misma fase que la señal del transmisor. La señal coherente y la señal STALO se mezclan y se entregan al amplificador de potencia, que se conecta y desconecta mediante el modulador de impulsos.
Onda continua
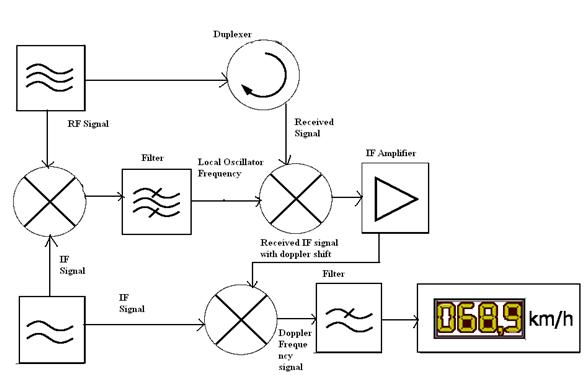
El RADAR de onda continua no mide el alcance del objetivo, sino la velocidad de cambio de alcance midiendo el desplazamiento Doppler de la señal de retorno. En un RADAR de onda continua se emite radiación electromagnética en lugar de pulsos. Se utiliza básicamente para medir la velocidad.
La señal de RF y la señal de FI se mezclan en la etapa de mezcla para generar la frecuencia del oscilador local. A continuación, la señal de RF se transmite y la señal recibida por la antena del RADAR está formada por la frecuencia de RF más la frecuencia de desplazamiento Doppler. La señal recibida se mezcla con la frecuencia del oscilador local en la segunda etapa de mezcla para generar la señal de frecuencia de FI.
Esta señal se amplifica y se entrega a la tercera etapa de mezcla, donde se mezcla con la señal de FI para obtener la señal con frecuencia Doppler. Esta frecuencia Doppler o desplazamiento Doppler proporciona la tasa de cambio de alcance del objetivo y, por tanto, se mide la velocidad del objetivo.
Ecuación de alcance del radar
Existen diferentes tipos de versiones para las ecuaciones de alcance del radar. La siguiente ecuación es uno de los tipos fundamentales para un sistema de antena única. Cuando se supone que el objeto está en el centro de la señal de la antena, el mayor alcance de detección del radar puede escribirse como
Rmax = 4√Pt λ2G2σ/(4π)3Pmin
= 4√Pt C2G2σ/fo2(4π)3Pmin
'Pt' = Potencia de transmisión
'Pmin' = Señal mínima detectable
λ' = Longitud de onda de transmisión
'σ' = Sección transversal del radar objetivo
'fo'= Frecuencia en Hz
'G' = Ganancia de una antena
c' = Velocidad de la luz
En la ecuación anterior, las variables son estables y dependen del radar, además del objetivo como RCS. El orden de la potencia de transmisión será 1 mW (0 dBm) y la ganancia de la antena aproximadamente 100 (20 dB) para una ERP (potencia radiada eficiente) de 20 dBm (100 mW). El orden de las señales menos perceptibles son los picowatios y el RCS de un vehículo podría ser de 100 metros cuadrados.
Por tanto, la exactitud de la ecuación del alcance del radar será el dato de entrada. Pmin (señal mínima perceptible) depende principalmente del ancho de banda del receptor (B), F (figura de ruido), T (temperatura) y la relación S/N (relación señal/ruido) necesaria.
Un receptor con un ancho de banda estrecho será más sensible en comparación con un receptor de ancho de banda amplio. La figura de ruido puede definirse como: es un cálculo de la cantidad de ruido que el receptor puede aportar a una señal. Cuando la figura de ruido es menor, el ruido que dona el dispositivo será menor. Cuando la temperatura aumenta, afectará a la sensibilidad del receptor por el aumento del ruido de entrada.
Pmin = k T B F (S/N)min
A partir de la ecuación anterior
'Pmin' es la señal menos detectable
'k' es la constante de Boltzmann como 1,38 x 10-23 (vatios*seg/°Kelvin)
'T' es la temperatura (°Kelvin)
b' es el ancho de banda de un receptor (Hz)
'F' es la Figura de Ruido (dB), el Factor de Ruido (ratio)
(S/N) min = Relación S/N mínima
La potencia de ruido térmico i/p disponible puede ser proporcional a la kTB donde "k" es la constante de Boltzmann, "T" es la temperatura y "B" es el ancho de banda del ruido del receptor en hercios.
T = 62,33°F o 290°K
B = 1 Hz
kTB = -174 dBm/Hz
La ecuación de alcance del radar anterior puede escribirse para la potencia recibida como una función de alcance para una potencia de transmisión, una ganancia de antena, un RCS y una longitud de onda determinados.
Prec = Pt λ2G2σ/(4π)3R4max = Pt C2G2σ/(4π)3R4fo2
Prec = PtG2(λ/4π)2 σ/4πR2
A partir de la ecuación anterior
'Prec' es la potencia recibida
pt" es la potencia de transmisión
'fo' es la frecuencia de transmisión
λ" es la longitud de onda de transmisión
g' es la ganancia de una antena
σ' es la sección transversal del radar
r' es el alcance
c" es la velocidad de la luz
Aplicaciones
El aplicaciones del radar incluyen las siguientes.
Aplicaciones militares
Tiene 3 aplicaciones principales en las Fuerzas Armadas:
- En la defensa aérea, se utiliza para la detección de objetivos, el reconocimiento de los mismos y el control de las armas (dirigiendo el arma hacia los objetivos rastreados).
- En un sistema de misiles para guiar el arma.
- Identificar la ubicación del enemigo en el mapa.
Control del tráfico aéreo
Tiene 3 aplicaciones principales en el control del tráfico aéreo:
- Para controlar el tráfico aéreo cerca de los aeropuertos. El RADAR de vigilancia aérea se utiliza para detectar y mostrar la posición de los aviones en las terminales de los aeropuertos.
- Para guiar a las aeronaves a aterrizar con mal tiempo, se utiliza el RADAR de aproximación de precisión.
- Para escanear la superficie del aeropuerto en busca de posiciones de aeronaves y vehículos terrestres
Teledetección
Se puede utilizar para observar si o para observar las posiciones planetarias y vigilar el hielo marino para garantizar una ruta fluida para los barcos.
Control del tráfico terrestre
También puede ser utilizado por la policía de tráfico para determinar la velocidad del vehículo, controlando el movimiento de los vehículos al avisar de la presencia de otros vehículos o de cualquier otro obstáculo detrás de ellos.
Espacio
Tiene 3 aplicaciones principales
- Guiar el vehículo espacial para un aterrizaje seguro en la luna
- Observar los sistemas planetarios
- Detectar y seguir satélites
- Para vigilar los meteoritos
Así pues, ahora he dado una información básica comprensión del RADAR¿qué tal si diseñas un proyecto sencillo con RADAR?
Créditos de las fotos
Si quieres conocer otros artículos parecidos a Qué es un RADAR : fundamentos, tipos y aplicaciones puedes visitar la categoría Generalidades.
Deja una respuesta
¡Más Contenido!