
Cómo calibrar con éxito una cadena de señal DAC de bucle abierto
Introducción
Cualquier aplicación electrónica práctica está sujeta a numerosas fuentes de error que pueden hacer que incluso los componentes más precisos se desvíen de su comportamiento de datos. Cuando la cadena de señales de la aplicación no tiene un mecanismo incorporado para autoajustarse a estos errores, el único enfoque para minimizar su impacto es medirlos y calibrarlos sistemáticamente.
Un sistema de lazo abierto es un sistema que no utiliza su salida para realizar acciones de control sintonizadas en sus entradas para lograr el rendimiento requerido, mientras que en un sistema de lazo cerrado la salida depende de una acción de control en el sistema que puede hacer correcciones aplicadas automáticamente. para mejorar el rendimiento. La mayoría de las cadenas de señales de convertidores de digital a analógico (DAC) son sistemas de configurar y olvidar, donde la precisión de la salida debe depender de la precisión de cada bloque en la cadena de señal. Un sistema de configuración y olvido es un sistema de bucle abierto. Para un sistema de circuito abierto que requiere alta precisión, es probable que sea necesaria y recomendada la calibración.
Presentaremos dos tipos de calibración de cadena de señal DAC: TempCal (calibración a temperatura de funcionamiento), que puede brindar el mejor nivel de corrección de errores, y SpecCal (calibración usando especificaciones), que es una alternativa válida cuando no es posible usar TempCal, pero no es tan completo.
| Calibración de temperatura | cal.espec. | |
| Errores intrínsecos de DAC | ✓ | ✓ |
| Errores intrínsecos de los componentes principales | ✓ | Puede incluirse (por ejemplo, VÁRBITRO) |
| Otros errores del sistema | ✓ | X |
tipo DAC
Un DAC de voltaje unipolar solo puede dar una salida positiva o negativa. Este artículo analizará el AD5676R como un ejemplo de un DAC unipolar y cómo calibrarlo con precisión. El mismo enfoque se puede utilizar para realizar los ajustes necesarios con otros tipos de DAC.
Los DAC bipolares como el AD5766 pueden lograr una salida positiva y negativa.
Los DAC de salida de corriente se utilizan normalmente en una configuración de multiplicador (MDAC) para proporcionar una ganancia variable; por lo general, requieren amplificadores externos para amortiguar el voltaje generado a través de una resistencia fija.
Los DAC de fuente de corriente de precisión (IDAC), como el AD5770R y el LTC2662, son una nueva clase de DAC que pueden establecer con precisión una corriente de salida dentro de un rango predefinido sin necesidad de un componente externo adicional.
Teoría de la función de transferencia DAC y errores intrínsecos
Un convertidor digital a analógico ideal produce un voltaje o corriente de salida analógica que es directamente proporcional al código digital de entrada e independiente de influencias externas no deseadas, como fuentes de alimentación y variaciones de referencia. Para un DAC de salida de voltaje ideal, la ganancia de salida para una ganancia de un paso del código digital de entrada se llama LSB y se define como:
lugar:
(VREF+) y (VREF-) son los voltajes de referencia positivo y negativo. En algunos casos, (VREF-) es igual a tierra (0 V).
n es la resolución del DAC en bits.
LSBCortar (V) el incremento más pequeño de la salida DAC en voltios.
Esto significa que la salida de voltaje del DAC debe predecirse con precisión cuando se conoce el LSB para cualquier código de entrada dado.

En la práctica, la precisión de la salida del DAC está sujeta a los errores de compensación y ganancia del DAC (errores intrínsecos) y otros componentes de la cadena de señal (errores de nivel del sistema). Por ejemplo, algunos DAC tienen un amplificador de salida incorporado, mientras que otros requieren uno que puede ser una fuente de errores adicionales.
En las fichas técnicas, las especificaciones más relevantes se definen en el apartado de terminología. Para los DAC, esta sección enumera parámetros como el error de compensación y el error de ganancia.
El error de escala cero es una medida del error de salida cuando el código cero (0x0000) se carga en el registro DAC.
La Figura 1 muestra cómo los errores de compensación y ganancia afectan la función de transferencia DAC para un DAC de voltaje unipolar.
El error de ganancia es una medida del error de rango del DAC, que se muestra en púrpura en la Figura 1. El error de ganancia es la desviación de la pendiente de la característica de transferencia del DAC con respecto al ideal. La transición DAC ideal se muestra en negro.
El error de compensación es una medida de la diferencia entre la salida real y la ideal, en la región lineal de la función de transferencia, que se muestra en azul en la Figura 1. Tenga en cuenta que la función de transferencia en azul se interpola al eje y para que coincida con negativo vAFUERA e identificar el error de compensación.
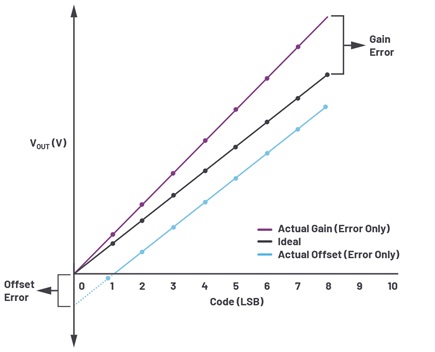
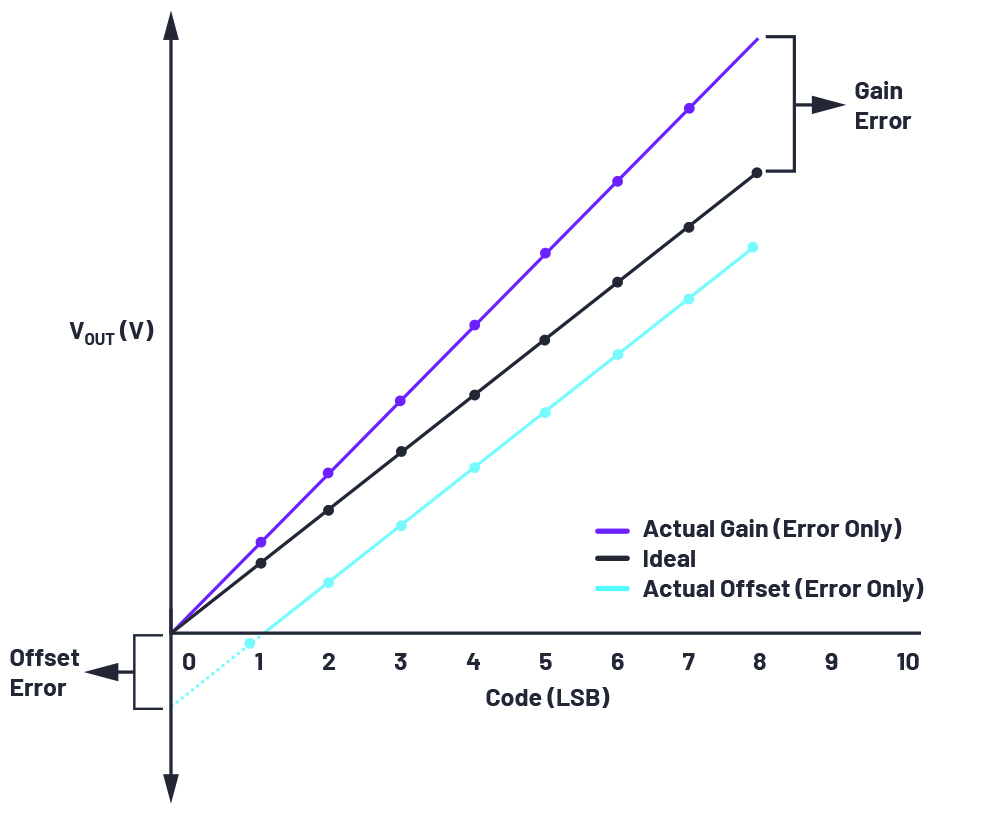
Figura 1. Ilustración de error de compensación y error de ganancia para un DAC unipolar.
El efecto del error de ganancia y el error de compensación se puede ver en el gráfico azul de la Figura 4.
Los mismos parámetros también se definen según su evolución (caudal) con los cambios de temperatura.
La desviación del error de código cero es una medida del cambio en el error de código cero con los cambios de temperatura.
El coeficiente de temperatura del error de ganancia es una medida del cambio en el error de ganancia con los cambios de temperatura.
La corriente de error de compensación es una medida del cambio en el error de compensación con el cambio de temperatura.
La variación de temperatura juega un papel importante en la precisión de los sistemas electrónicos. Aunque la ganancia intrínseca y el error de compensación de un DAC generalmente se especifican en relación con la temperatura, existen otros componentes del sistema que pueden afectar la ganancia y compensación de salida general.
Por lo tanto, incluso cuando el INL y DNL del DAC son muy competitivos, hay otros errores a considerar, especialmente para la temperatura. Los DAC más nuevos especifican el error total no ajustado (TUE) como una medida del error de salida teniendo en cuenta los diversos errores, es decir, el error INL, el error de compensación, el error de ganancia y la corriente de salida en las fuentes de alimentación y la temperatura. TUE se expresa en % FSR.
Cuando la TUE para un DAC no se especifica en la hoja de datos, se puede calcular usando una técnica llamada RSS, o raíz de suma de cuadrados, una técnica que se usa para agregar fuentes de error no correlacionadas para errores analíticos.

Existen otras fuentes de error menores que se suelen omitir por su contribución menos relevante, como la corriente de salida, etc.
Todas las especificaciones de todos los componentes del sistema deben convertirse a las mismas unidades. Esto se puede hacer usando la Tabla 2.
| LSB | voltaje | FSR | ppm | |
| LSB | LSB/2NO ×VÁRBITRO | LSB/2NO ×100 | LSB/2NO x106 | |
| voltaje | (V×2N)/VÁRBITRO | v/vÁRBITRO ×100 | v/vÁRBITRO x106 | |
| FSR | (% FSR)/100 × 2NO | %FSR/100 × VÁRBITRO | % FSR × 104 | |
| ppm | ppm/106 ×2NO | ppm/106 ×VÁRBITRO | ppm/104 |
TUE es una gran ventaja para explicar sucintamente la precisión de una salida DC DAC debido a la suma de errores intrínsecos; sin embargo, no tiene en cuenta los errores a nivel del sistema que varían según la cadena de señal en la que se implementa el DAC y su entorno.
Cabe señalar que su búfer/amplificador está integrado en la etapa de salida y los datos en este caso muestran los efectos de ambos dentro del alcance de los errores intrínsecos.
Errores a nivel de sistemas
Al tratar de analizar el balance de errores de una cadena de señal DAC para una aplicación en particular, el diseñador del sistema debe considerar y verificar las contribuciones de los diversos componentes, teniendo en cuenta la temperatura a la que se espera que funcione el sistema. Dependiendo de las aplicaciones finales, la cadena de señal puede contener muchos componentes diferentes, incluidos circuitos integrados de potencia, búferes o amplificadores, y diferentes tipos de cargas activas que pueden contribuir a errores a nivel del sistema.
Fuente de referencia
Todos los DAC requieren una referencia de voltaje para funcionar. La fuente de referencia es uno de los principales contribuyentes a la precisión del DAC y la cadena de señal general.
Las especificaciones de rendimiento de referencia clave también se definen en hojas de referencia independientes como la familia ADR45xx o como parte de la hoja de datos DAC si el dispositivo tiene una fuente de referencia interna disponible para el usuario.
El voltaje de caída, a veces llamado margen de voltaje de suministro, se define como el diferencial de voltaje mínimo entre la entrada y la salida, de modo que el voltaje de salida se mantiene con una precisión del 0,1%.
Coeficiente de temperatura (TC o TCVAFUERA) relaciona el cambio en el voltaje de salida con un cambio en la temperatura ambiente del dispositivo, normalizado por el voltaje de salida a 25 °C. TVCAFUERA para ADR4520/ADR4525/ADR4530/ADR4533/ADR4540/ADR4550 Los grados A y B se prueban completamente a tres temperaturas: -40 °C, +25 °C y +125 °C. TVCAFUERA prueba completamente tu grado C a tres temperaturas: 0°C, +25°C y +70°C. Este parámetro se especifica utilizando dos métodos. El método de la caja es el método más común y tiene en cuenta el coeficiente de temperatura en todo el rango de temperatura, mientras que el método de la pajarita calcula la pendiente del peor de los casos a partir de +25 °C y, por lo tanto, es más útil para sistemas calibrados a +25 °C.
Para algunos DAC, las fuentes de referencia externas funcionan mejor que las referencias integradas. La tensión de referencia tiene un efecto directo sobre la función de transferencia, por lo que cualquier modificación de esta tensión cambia proporcionalmente la pendiente de la función de transferencia, es decir, la ganancia.
Cabe señalar que algunos DAC tienen una referencia de búfer interna incorporada y las especificaciones de la hoja de datos en este caso muestran los efectos de estos bloques internos como parte de los errores intrínsecos.
línea de control
La regulación de línea se define para cada IC independiente que actúa como fuente de alimentación cuando la salida cambia en respuesta a un cambio de entrada particular. Esto se aplica a las fuentes de alimentación, los búferes y los circuitos integrados de referencia que se espera que mantengan un voltaje de salida estable independientemente de la entrada. La regulación de la línea generalmente se especifica en las hojas de datos a temperatura ambiente.
Control de carga
La regulación de carga se define como el cambio incremental en el voltaje de salida para un cambio en la corriente de carga. Las salidas de voltaje normalmente están protegidas para reducir el impacto de esta variación. Algunos DAC pueden no almacenar en búfer la entrada de referencia. Por lo tanto, a medida que cambia el código, la impedancia de entrada de referencia también cambia, lo que hace que cambie el voltaje de referencia. El efecto sobre la salida suele ser pequeño, pero debe tenerse en cuenta en aplicaciones de alta precisión. Esto generalmente se especifica en las hojas de datos a temperatura ambiente.
Compensación de resistencia al calor de apio
La compensación de la resistencia al calor de la soldadura (SHR) es particularmente relevante para la fuente de referencia. Se refiere al cambio permanente en el voltaje de salida causado por la exposición a la soldadura por reflujo y se expresa como un porcentaje del voltaje de salida. Consulte las hojas de la familia ADR45xx para obtener más detalles. En general, cambiar SHR afecta a todos los circuitos integrados de alguna manera, pero esto no siempre es cuantificable y depende en gran medida del ensamblaje del sistema específico de la aplicación.
Estabilidad a largo plazo
La estabilidad a largo plazo define el cambio en el voltaje de salida con el tiempo y se especifica en ppm/1000 horas. La estabilidad a largo plazo de una aplicación se puede mejorar quemando a nivel de PCB.
Teoría de calibración de lazo abierto
En la Figura 2 se muestra un diagrama simplificado de la cadena de señal DAC. Los bloques enmarcados en negro representan una cadena de señal de bucle abierto simplificada, mientras que los enmarcados en gris son un ejemplo de los componentes adicionales necesarios para lograr la cadena de señal en bucle cerrado. .
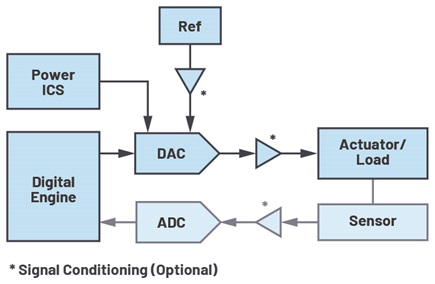
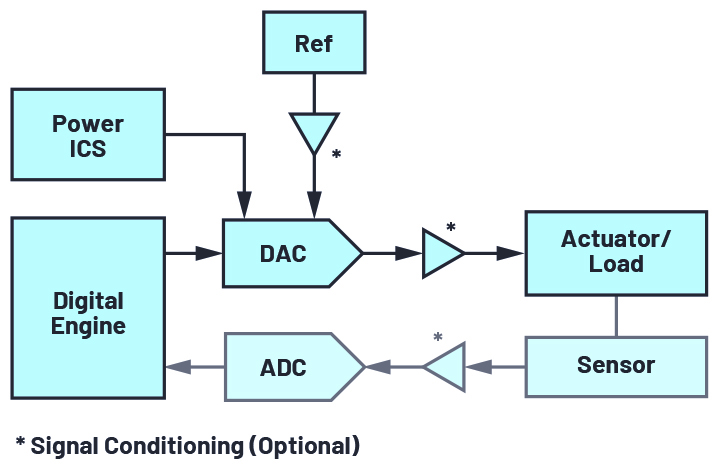
Figura 2. Diagrama simplificado de la cadena de señal DAC.
La opción de circuito cerrado requiere componentes adicionales y manipulación de datos digitales a través de software para proporcionar una salida mucho más precisa. Cuando estos recursos adicionales no se pueden agregar por varias razones (espacio, costo, etc.), la solución de circuito abierto sigue siendo válida, siempre que pueda proporcionar la precisión requerida. Aquí es donde este artículo puede ayudar a aclarar cómo se puede realizar la calibración de bucle abierto.
La calibración de los errores de compensación y ganancia que son constantes sin influencia externa es un procedimiento teóricamente simple. La región lineal de la función de transferencia DAC se puede modelar como una línea recta que describe:

lugar:
ahí está la salida.
m es la pendiente de la función de transferencia teniendo en cuenta el error de ganancia (mostrado en púrpura en la Figura 1).
x es la entrada DAC.
c es el voltaje de compensación (mostrado en azul en la Figura 1).
Idealmente, i es siempre uno y c es siempre cero. En la práctica, tienen en cuenta la ganancia del DAC y el error de compensación y, cuando se conocen, pueden tenerse en cuenta en la entrada del DAC para obtener un número más cercano a la salida ideal del DAC. La ganancia se puede calibrar multiplicando la entrada digital DAC por el inverso del error de ganancia. El error de compensación se puede eliminar agregando el inverso del error de compensación medido a la entrada digital DAC.
La siguiente ecuación muestra cómo calcular la entrada DAC correcta para producir el voltaje deseado:

lugar:


Tenga en cuenta que el error de compensación puede ser positivo o negativo.
Consulte también "Técnicas de calibración de bucle abierto para convertidores de digital a analógico"
Diálogo analógico artículo
Cómo calibrar con éxito una cadena de señal DAC
En esta sección, describiremos cómo calibrar la compensación y la ganancia en una cadena de señal DAC en la práctica, usando el AD5676R como ejemplo. Para todas las medidas se utilizó el kit de evaluación EVAL-AD5676 con la referencia interna AD5676R habilitada. La placa EVAL-AD5676 y la configuración de medición son parte de la cadena de señal que estamos midiendo en el ejemplo. Cada componente en esta cadena de señal (alimentación a bordo IC, AD5676R, ruido introducido a través del diseño y los conectores, etc.) contribuye a los errores del sistema. La idea es mostrar cómo se puede calibrar este sistema como ejemplo de cualquier otro sistema seleccionado.
Se usa una placa de control Blackfin® EVAL-SDP-CB1Z SDP (SDP-B) para comunicarse con el AD5676R en el kit de evaluación EVAL-AD5676 y se usa un multímetro digital de 8 dígitos para medir el voltaje de salida V.AFUERA0. Se utiliza una cámara climática para controlar la temperatura de todo el sistema que consta de EVAL-SDP-CB1Z más EVAL-AD5676 con el AD5676R utilizando la referencia interna.
El EVAL-AD5676 se alimenta como se describe en la Guía del usuario y la configuración de conexión se muestra en la Tabla 3.
| N.º de enlace | Correo |
| LK1 | A |
| LK2 | A |
| LK3 | A |
| LK4 | A |
En primer lugar, se evaluaron los errores de la cadena de señal sin calibración (NoCal) para diferentes temperaturas. El error de salida se calculó teniendo en cuenta la diferencia en LSB entre el valor ideal y el valor medido en un código de entrada dado. Incluye el Este error son los errores internos y externos del DAC y la cadena de señal general en la placa EVAL-AD5676. El error de salida sin calibración se muestra en la Figura 3.
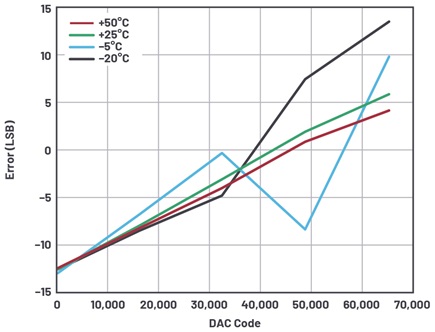
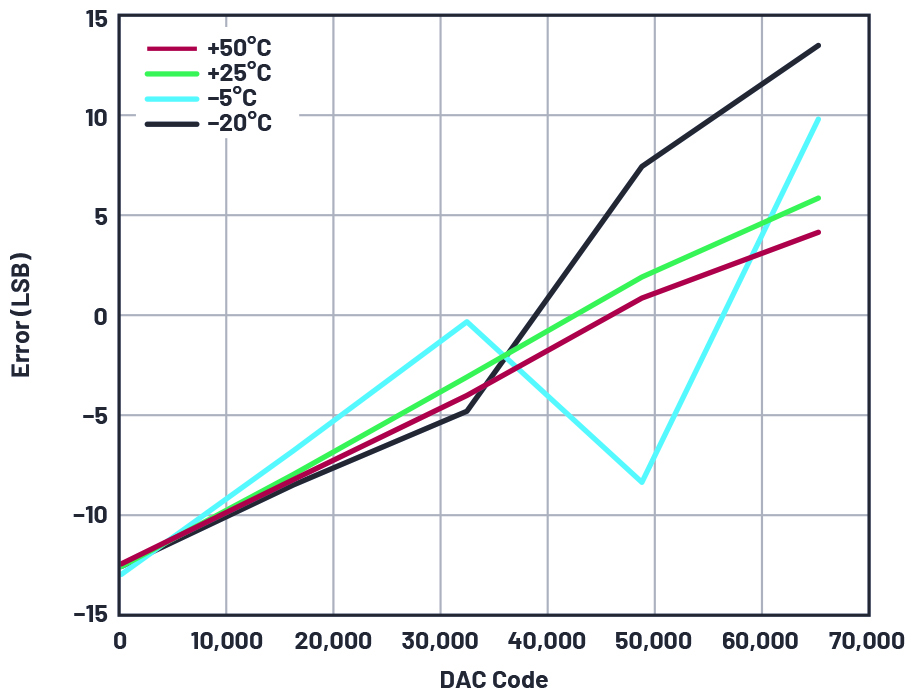
Figura 3. Error de salida de EVAL-AD5676 en LSB con NoCal.
La función de transferencia contiene la información necesaria para calcular los errores de compensación y ganancia seguidos de los códigos de corrección. Esto requiere dos puntos: un punto de datos cerca de la escala cero (ZSLIN) y un punto cerca de la escala completa (FSLIN). La idea es operar en la región lineal del DAC. Esta información generalmente se proporciona con las especificaciones INL y DNL, probablemente en las notas finales de la tabla de especificaciones. Para el AD5676R, por ejemplo, la región lineal va del código 256 al código 65280.
La Figura 4 muestra un diagrama para explicar la región lineal de DAC.
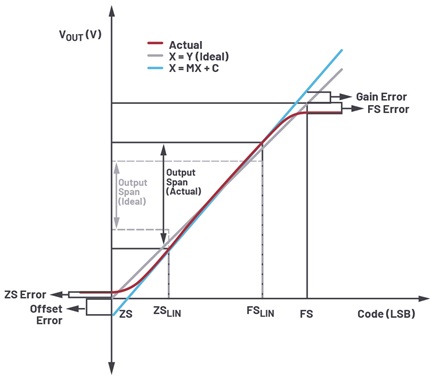
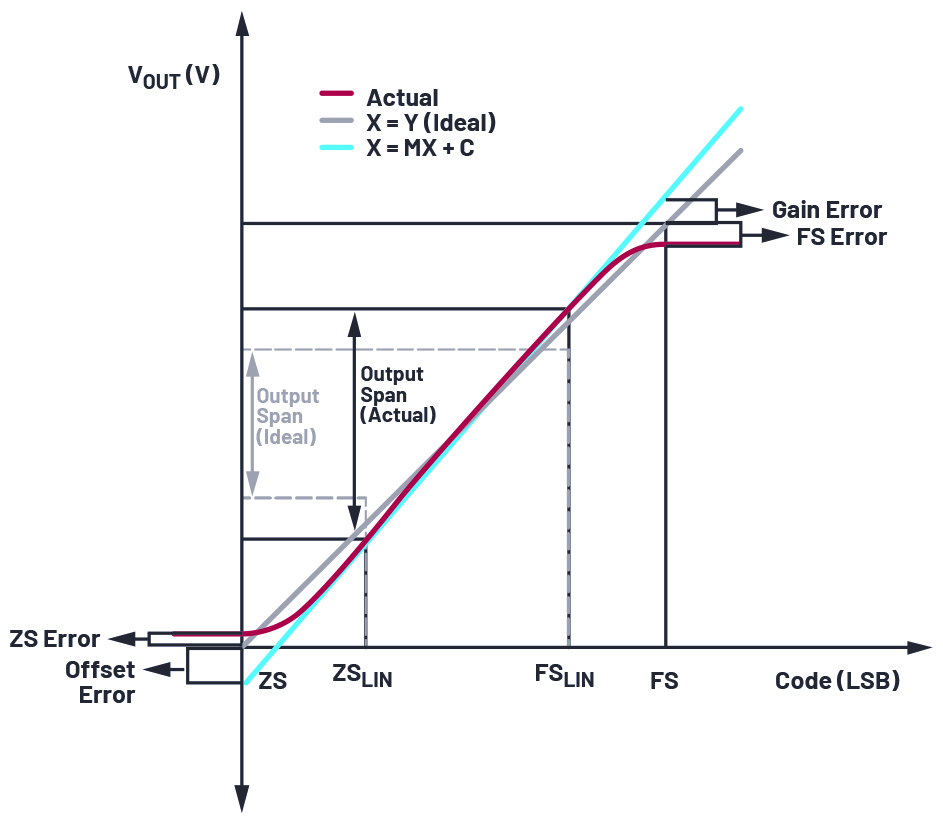
Figura 4. Función de transferencia DAC de voltaje unipolar y errores.
Tan pronto como el ZSlino y FSlino se han identificado los códigos, podemos recopilar las medidas necesarias para la calibración, que son las salidas de voltaje del DAC en esos dos códigos (VAFUERA en ZSlino y VAFUERA en FSlino), así como algunos otros códigos intermedios (escala ¼, escala media y escala ¾)
Las mediciones deben tomarse a la temperatura de funcionamiento de la aplicación. Cuando esto no es posible, los datos de los dispositivos de la cadena de señal se pueden utilizar para derivar la información necesaria, una vez que se hayan recopilado los dos puntos de datos principales a temperatura ambiente.
Cada dispositivo de la cadena de señal aporta errores, y cada tarjeta es diferente de las demás, por lo que debe calibrarse individualmente.
TempCal: Calibración a temperatura de funcionamiento
El mejor nivel de calibración se logra midiendo los errores en el entorno de la aplicación a la temperatura de funcionamiento y corrigiéndolos constantemente mientras se escribe en el DAC para actualizar la salida.
Para calibrar el DAC con este método, a la temperatura a la que funcionará el sistema, mida la salida del DAC en el código ZSLIN y FSLIN. Construya la función de transferencia de la siguiente manera:






lugar:
Vequipo original = Error de compensación (V)
VFS, LIN, ACTO = Salida real en FSlino
VZS, LIN, ACTO = Salida real en ZSlino
VFS, LIN, IDEAL = Eficiencia ideal en FSlino
VZS, LIN, IDEAL = Resultado ideal en ZSlino
Tenga en cuenta que el error de compensación puede ser positivo o negativo.
La Figura 5 muestra la salida de error obtenida para el kit de evaluación EVAL-AD5676 con el método TempCal.
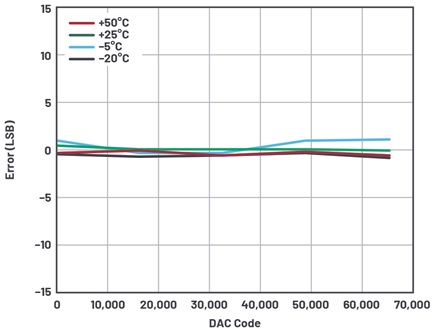
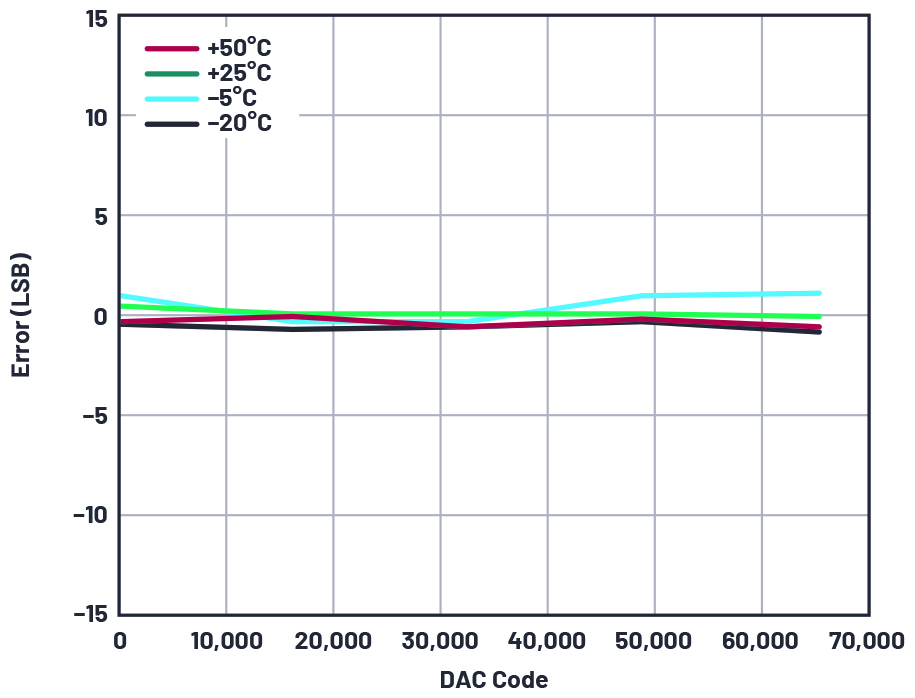
Figura 5. Error de salida del sistema en LSB con TempCal a diferentes temperaturas.
SpecCal: Calibración usando especificaciones
Si los errores no se pueden medir en el entorno de la aplicación a la temperatura de funcionamiento, aún se puede lograr un alto nivel de calibración utilizando la hoja AD5676R y una función de transferencia DAC calibrada a temperatura ambiente.
Para calibrar el DAC con este método, mida la salida del DAC en los códigos ZSlino
y FSlino a temperatura ambiente. Construya la función de transferencia como se describe en la sección TempCal calculando la ganancia y el error de compensación a temperatura ambiente y aplicando la ecuación 14.

lugar:
GEamb = Error de ganancia a temperatura ambiente
VEO, tiempo = Error de compensación (V) a temperatura ambiente
Calibrar la cadena de señal DAC a temperatura ambiente introduce errores a nivel del sistema. Sin embargo, no se tiene en cuenta el cambio en los errores externos debido al cambio de temperatura; por lo tanto, este método de calibración no es tan preciso como el método TempCal.
El cambio en los errores intrínsecos del DAC, es decir, los errores de compensación y ganancia, debido al cambio en la temperatura de funcionamiento se puede contabilizar utilizando las especificaciones de la hoja de datos. Lo llamamos SpecCal. El valor típico de la corriente de error de compensación se enumera en la tabla de especificaciones de la hoja de datos AD5676R, y el error de compensación de las características típicas de rendimiento de temperatura (TPC) indica la dirección en la que va el error según el aumento o la disminución de la temperatura ambiente. .

El cambio en el error de ganancia debido a la temperatura se muestra en Error de ganancia vs. temperatura TPC. Determine el error de ganancia en % de FSR a partir del gráfico y aplique la ecuación 16.

Ahora que hemos estimado el error de compensación y el error de ganancia a la temperatura de operación, podemos usar la Ecuación 17 para determinar los códigos de entrada para la salida SpecCal.
lugar:

La Figura 6 muestra la salida de error obtenida para el kit de evaluación EVAL-AD5676 con el método SpecCal.
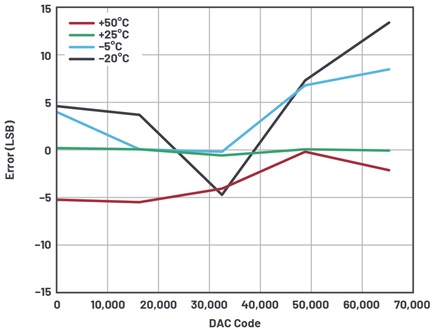
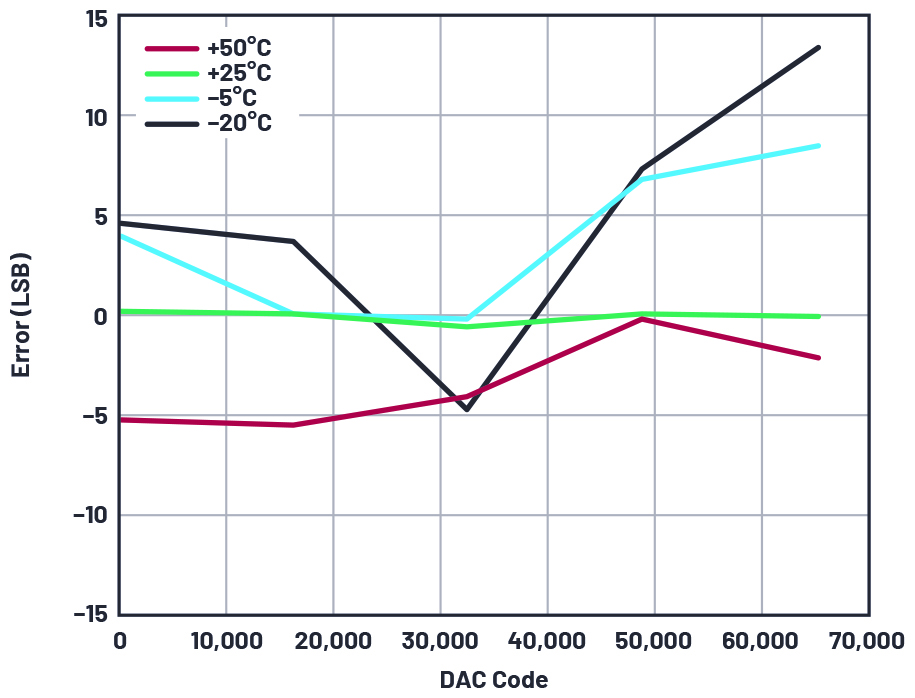
Figura 6. Error de salida del sistema en LSB con SpecCal a diferentes temperaturas.
En este caso se utilizó la referencia interna. Una referencia externa puede aumentar el error general. Los errores debidos a la fuente de referencia se pueden tener en cuenta al usar la hoja de datos de referencia al incluir la corriente de referencia a la temperatura de interés. Los cambios en el voltaje de referencia cambian el rango de salida real y, por lo tanto, el tamaño del LSB. Esto debe tenerse en cuenta si se utiliza una referencia externa. La temperatura relativa al voltaje de salida del TPC se puede usar para determinar la variación en el rango de salida debido a la corriente de referencia.

lugar:

Conclusión
Este artículo describe algunas de las principales causas de error en la cadena de señal DAC, incluidos los errores intrínsecos de DAC definidos en la hoja de datos y los errores a nivel del sistema que varían según el sistema y deben tenerse en cuenta en una aplicación de circuito abierto.
Se discutieron dos métodos de calibración, uno para cuando el DAC se puede calibrar a la temperatura a la que operará el sistema y el segundo para cuando no se puede calibrar a la temperatura de funcionamiento, pero las mediciones se pueden realizar a la temperatura de la habitación. El segundo método utiliza los TPC y las especificaciones descritas en la hoja de datos del DAC y otros circuitos integrados en la cadena de señal, para tener en cuenta la ganancia y la compensación de corriente de error.
El método TempCal puede lograr una precisión mucho mayor que el método SpecCal. Por ejemplo, la Figura 7 muestra, para el mapa EVAL-AD5676 a 50 °C, cómo el método TempCal logró un nivel de precisión muy cercano al ideal, mientras que el método SpecCal aún logró brindar una mejora en comparación con los datos de NoCal.
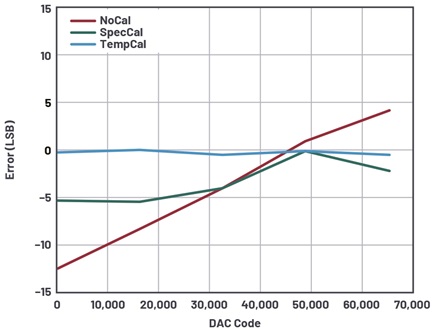
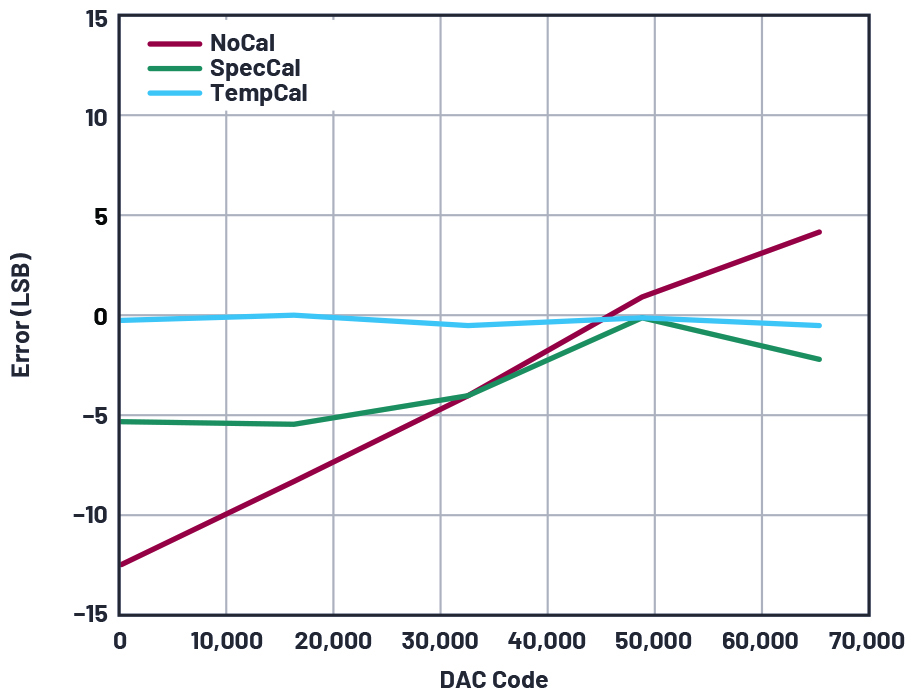
Figura 7. Error de salida del sistema en LSB con NoCal, SpecCal y TempCal a 50°C.
La variación de temperatura juega un papel importante en la precisión de los sistemas electrónicos. La calibración a la temperatura de funcionamiento del sistema compensa la mayoría de los errores. Si esto no es posible, la variación de temperatura se puede tratar con la información disponible en las hojas de datos del DAC y otros circuitos integrados para lograr una precisión aceptable.
Si quieres conocer otros artículos parecidos a Cómo calibrar con éxito una cadena de señal DAC de bucle abierto puedes visitar la categoría Generalidades.
Deja una respuesta
¡Más Contenido!