
Servomotor - Funcionamiento, ventajas y desventajas
El servo implica un control de retroalimentación con detección de errores que se utiliza para corregir el rendimiento de un sistema. También requiere un controlador generalmente sofisticado, a menudo un módulo dedicado diseñado especialmente para su uso con servomotores. Los servomotores son motores de corriente continua que permiten un control preciso de la posición angular. Son motores de corriente continua cuya velocidad se reduce lentamente gracias a los engranajes. Los servomotores suelen tener un corte de revolución de 90° a 180°. Algunos servomotores también tienen un corte de revolución de 360° o más. Pero los servomotores no giran constantemente. Su rotación está limitada entre los ángulos fijos.
El servomotor es un conjunto de cuatro cosas: un motor de corriente continua normal, un reductor de engranajes, un dispositivo de detección de posición y un circuito de control. El motor de corriente continua está conectado con un mecanismo de engranajes que proporciona retroalimentación a un sensor de posición que, en su mayoría, es un potenciómetro. Desde el reductor, la salida del motor se envía por medio de un servo spline al servobrazo. En los servomotores estándar, el engranaje suele ser de plástico, mientras que en los servos de alta potencia, el engranaje es de metal.
Un servomotor consta de tres cables: un cable negro conectado a tierra, un cable blanco/amarillo conectado a la unidad de control y un cable rojo conectado a la fuente de alimentación.
La función del servomotor es recibir una señal de control que representa una posición de salida deseada del servoeje y aplicar energía a su motor de corriente continua hasta que su eje gire hasta esa posición.
Utiliza el dispositivo de detección de posición para averiguar la posición de rotación del eje, de modo que sabe hacia dónde debe girar el motor para mover el eje hasta la posición indicada. Por lo general, el eje no gira libremente como un motor de corriente continua, sino que sólo puede girar 200 grados.
A partir de la posición del rotor, se crea un campo magnético giratorio para generar eficazmente el toque. La corriente fluye por el bobinado para crear un campo magnético giratorio. El eje transmite la potencia de salida del motor. La carga se acciona a través del mecanismo de transferencia. El imán de tierras raras u otro imán permanente de alta función se coloca en el exterior del eje. El codificador óptico vigila siempre el número de rotaciones y la posición del eje.
Funcionamiento de un servomotor
El servomotor está formado por un motor de corriente continua, un sistema de engranajes, un sensor de posición y un circuito de control. Los motores de CC se alimentan de una batería y funcionan a alta velocidad y bajo par. El conjunto de engranajes y ejes conectados a los motores de CC reducen esta velocidad a una velocidad suficiente y un par más elevado. El sensor de posición detecta la posición del eje a partir de su posición definitiva y transmite la información al circuito de control. El circuito de control descifra las señales del sensor de posición y compara la posición real de los motores con la posición deseada y, en consecuencia, controla el sentido de giro del motor de CC para obtener la posición deseada. Los servomotores suelen necesitar una alimentación de corriente continua de 4,8 V a 6 V.
Control de un servomotor
El control de un servomotor se realiza controlando su posición mediante la técnica de modulación de la anchura de los impulsos. La anchura del pulso aplicado al motor se varía y se envía durante un tiempo fijo.
La anchura del pulso determina la posición angular del servomotor. Por ejemplo, una anchura de pulso de 1 ms provoca una posición angular de 0 grados, mientras que una anchura de pulso de 2 ms provoca una anchura angular de 180 grados.
Ventajas:
- Si se coloca una carga pesada en el motor, el excitador aumentará la corriente en la bobina del motor al intentar hacerlo girar. No hay condición de fuera de paso.
- Es posible el funcionamiento a alta velocidad.
Desventajas
- Como el servomotor intenta girar según los impulsos de mando, pero se retrasa, no es adecuado para el control de precisión de la rotación.
- Mayor coste.
- Cuando está parado, el rotor del motor sigue moviéndose hacia delante y hacia atrás un pulso, por lo que no es adecuado si necesitas evitar las vibraciones
7 Aplicaciones de los servomotores
Los servomotores se utilizan en aplicaciones que requieren variaciones rápidas de velocidad sin que el motor se sobrecaliente.
- En la industria se utilizan en máquinas-herramienta, embalaje, automatización de fábricas, manipulación de materiales, conversión de impresiones, líneas de montaje y muchas otras aplicaciones exigentes de robótica, maquinaria CNC o fabricación automatizada.
- También se utilizan en los aviones de radiocontrol para controlar el posicionamiento y el movimiento de los ascensores.
- Se utilizan en los robots por su suavidad de conexión y desconexión y su precisión de posicionamiento.
- También se utilizan en la industria aeroespacial para mantener el fluido hidráulico en sus sistemas hidráulicos.
- Se utilizan en muchos juguetes de radiocontrol.
- Se utilizan en dispositivos electrónicos como los reproductores de DVD o de discos Blue-ray para extender o reproducir las bandejas de los discos.
- También se utilizan en los automóviles para mantener la velocidad de los vehículos.
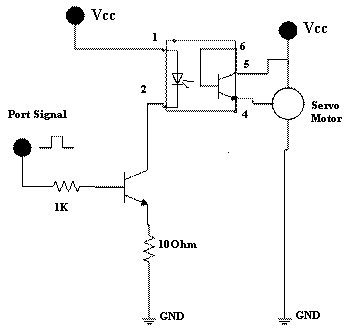
Circuito de aplicación del servomotor
A partir del siguiente circuito de aplicación: Cada motor tiene tres entradas: VCC, tierra y una señal periódica de onda cuadrada. El ancho de pulso de la onda cuadrada determina la velocidad y la dirección de los servomotores. En nuestro caso, sólo necesitamos cambiar la dirección para que el aparato pueda avanzar, retroceder y girar a la izquierda y a la derecha. Si la anchura del pulso está por debajo de un determinado intervalo de tiempo, el motor se moverá en el sentido de las agujas del reloj. Si la anchura de los impulsos supera ese tiempo, el motor se moverá en sentido contrario a las agujas del reloj. El marco de tiempo medio puede ajustarse mediante un potenciómetro incorporado en el interior del motor.
3 Diferencias entre el motor paso a paso y el servomotor:
- Los motores paso a paso tienen un gran número de polos, pares magnéticos generados por un imán permanente o una corriente eléctrica. Los servomotores tienen muy pocos polos; cada polo ofrece un punto de parada natural para el eje del motor.
- El par de un motor paso a paso a bajas velocidades es mayor que el de un servomotor del mismo tamaño.
- El funcionamiento del motor paso a paso se sincroniza con las señales de los impulsos de mando emitidos por el generador de impulsos. En cambio, el funcionamiento del servomotor se retrasa con respecto a los impulsos de mando.
Ahora ya tienes una idea del funcionamiento del servomotor, si tienes alguna duda sobre este tema o sobre los proyectos de electricidad y electrónica deja los comentarios a continuación.
Crédito de la foto
Si quieres conocer otros artículos parecidos a Servomotor - Funcionamiento, ventajas y desventajas puedes visitar la categoría Generalidades.
Deja una respuesta
¡Más Contenido!