
Qué es el motor de inducción lineal: estructura y funcionamiento
En la década de 1840, Charles Wheatstone comenzó a desarrollar un motor de inducción lineal en Londres, pero parecía poco práctico. Sin embargo, en 1935, Hermann Kemper desarrolló el modelo operativo y en 1940 Eric presentó la versión operativa a escala real. Posteriormente, este dispositivo se utilizó en numerosas aplicaciones en muchos sectores. Este artículo explica claramente el motor de inducción lineal, su principio de funcionamiento, su rendimiento, su diseño, su construcción, sus ventajas e inconvenientes y sus principales aplicaciones. Vamos a desarrollar el concepto.
¿Qué es un motor de inducción lineal?
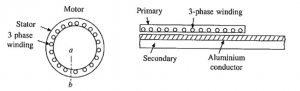
El motor de inducción lineal, abreviado LIM, es una versión mejorada del motor de inducción rotativo, que produce un movimiento lineal de traslación en lugar de un movimiento de rotación. Este dispositivo genera un movimiento y una fuerza lineal en lugar de un par de giro. El diseño y la funcionalidad del motor de inducción lineal pueden verse en la figura siguiente, creando un corte de forma radical en la inducción rotativa y nivelando así la sección.
El resultado es un estator nivelado o lado superior con láminas revestidas de hierro que transportan devanados trifásicos de múltiples polos con conductores de 90º0 ángulos con respecto a la dirección del movimiento. También es un tipo de bobinado de ardilla, mientras que suele tener una placa de aluminio o cobre sin fin que se sostiene sobre un soporte de hierro chapado sólido.
Independientemente del nombre del aparato, no todos los motores de inducción lineal generan un movimiento lineal; pocos de ellos se utilizan para realizar giros de gran diámetro y el uso de secciones primarias sin fin es más caro.
Diseño
La construcción fundamental y diseño del motor de inducción lineal corresponde casi al mismo motor de inducción trifásico, aunque no parece un motor de inducción normal. Cuando se forma un corte en la sección del estator del motor de inducción polifásico y se coloca sobre una superficie plana, se crea la sección primaria del motor de inducción lineal. Del mismo modo, cuando se forma un corte en la sección del rotor del motor de inducción polifásico y se coloca sobre una superficie plana, se crea la sección secundaria del motor de inducción lineal.
Además, hay otro modelo de motor de inducción lineal que se utiliza para mejorar el rendimiento y se llama DLIM, o motor de inducción lineal de doble cara. Este modelo tiene una sección primaria situada en un extremo de la sección secundaria. Este diseño se utiliza para mejorar el aprovechamiento del flujo tanto en el lado primario como en el secundario. Esta es la construcción de un motor de inducción lineal.
Principio de funcionamiento del motor de inducción lineal
La siguiente sección proporciona una explicación clara de la funcionamiento del motor de inducción lineal.
Cuando la sección primaria del motor se alimenta con energía trifásica equilibrada, el movimiento del flujo se produce en toda la longitud de la sección primaria. Este movimiento lineal del campo magnético es igual al campo magnético giratorio en la sección del estator del motor de inducción trifásico.
Así, habrá inducción de corriente eléctrica en los conductores del devanado secundario debido al movimiento comparativo entre el conductor y el flujo. La corriente inducida se relaciona con el movimiento del flujo para generar un empuje o fuerza lineal y esto se demuestra con
Vs = 2tfs m/seg
Cuando la sección primaria es constante y la sección secundaria se mueve, la fuerza tira de la sección secundaria en su propia dirección y esto genera el movimiento rectilíneo necesario. Cuando se suministra energía al sistema, el campo generado proporcionará un campo móvil lineal cuya velocidad está representada por la ecuación anterior.
En la ecuación, "fs" corresponde a la frecuencia de la potencia medida en Hz
'Vs' corresponde al campo móvil lineal medido en m/seg
t" corresponde al paso lineal de los polos, es decir, la distancia entre polo y polo, medida en metros
V = (1-s)Vs
Según la misma justificación, en las condiciones de un motor de inducción, la pista secundaria no mantiene la misma velocidad que el valor de la velocidad del campo magnético. Por ello, se genera un deslizamiento.
El esquema del motor de inducción lineal se muestra de la siguiente manera:
Características del motor de inducción lineal
Algunas de las características de la LIM son
Efecto final
A diferencia de los motores de inducción circular, el motor LIM tiene una característica llamada "efecto final". El efecto final consiste en pérdidas de eficiencia y rendimiento que son consecuencia de la energía magnética transportada y liberada al final de la sección primaria a través del movimiento relativo de las secciones primaria y secundaria.
Sólo en lo que respecta a la sección secundaria, la funcionalidad del dispositivo parece ser la misma que la de la máquina rotativa, con una distancia de casi dos polos, pero con una mínima reducción del empuje primario que se produce a bajo deslizamiento, si la máquina tiene más de 8 polos. Con la existencia de efectos finales, los dispositivos LIM no tienen la capacidad de funcionar con luz, mientras que el tipo general de motor de inducción tiene la capacidad de hacer funcionar el motor con un campo sincrónico más cercano en circunstancias de carga mínima. En cambio, el efecto final genera las pérdidas correspondientes a los motores lineales.
Empuje
El empuje causado por los dispositivos LIM es casi idéntico al de los motores de inducción generales. Estas fuerzas de tracción representan una curva característica aproximadamente igual a la del deslizamiento, aunque modulada por los efectos de los extremos. Esto también se denomina tensión de tracción. Lo demuestra
F = Pg/Vs medido en Newtons
Levitación
Además, a diferencia del motor rotativo, los dispositivos LIM tienen una fuerza de levitación electrodinámica que tiene una lectura nula en el deslizamiento "0" y genera una cantidad de espacio aproximadamente fija cuando el deslizamiento aumenta en cualquier dirección. Esto sólo ocurre con los motores unilaterales, y generalmente esta característica no se da cuando se utiliza una placa de soporte de hierro para la sección secundaria, porque esto crea una atracción que supera la presión de elevación.
Efecto de borde transversal
Los motores de inducción lineal también presentan un efecto de borde transversal, es decir, las trayectorias de la corriente que están en la misma dirección del movimiento desarrollan pérdidas y, debido a estas trayectorias, se produce una reducción del empuje efectivo. Por eso se produce el efecto de los bordes cruzados.
Rendimiento
El rendimiento del motor de inducción lineal puede conocerse mediante la teoría que se explica a continuación, en la que la velocidad sincrónica de la onda en movimiento está representada por
Vs = 2f (médula del polo lineal)........m/s
'f' corresponde a la frecuencia suministrada medida en Hertz
En el caso de un motor de inducción rotativo, la velocidad de la sección secundaria en la LIM es inferior a la velocidad sincrónica y viene dada por
Vr = Vs (1-s), "s" es el deslizamiento LIM y es
S = (Vs - Vr)/Vs
La fuerza lineal viene dada por
F = potencia del entrehierro/Vs
La forma de la curva de velocidad de empuje del LIM es casi idéntica a la curva de velocidad/par del motor de inducción rotativo. Si se compara el motor LIM con el motor de inducción rotativo, el motor de inducción lineal requiere un mayor entrehierro y, por tanto, la corriente magnetizante aumentará y factores como el rendimiento y el factor de potencia serán mínimos.
En el caso de la RIM, el área de las secciones del estator y del rotor es similar, mientras que en la LIM una es más corta que la otra. A velocidad constante, el tramo más corto tendrá un paso continuo que el otro.
Ventajas y desventajas
El ventajas del motor de inducción lineal son:
Las principales ventajas de la pizarra interactiva son
- No hay fuerzas magnéticas de atracción en el momento del montaje. Como los dispositivos LIM no tienen imanes permanentes, no hay fuerzas de atracción en el momento del montaje del sistema.
- Los motores de inducción lineal también tienen la ventaja de recorrer largas distancias. Estos dispositivos se implementan principalmente para aplicaciones de larga distancia, porque las secciones secundarias no están equipadas con imanes permanentes. La ausencia de imanes en la segunda sección permite que estos dispositivos sean baratos, ya que el precio del dispositivo reside esencialmente en el desarrollo de una pista magnética.
- Eficaz para aplicaciones pesadas. Los motores lineales de inducción se utilizan principalmente en condiciones de motor lineal de alta presión, donde se presentan con valores de fuerza constante de casi 25gms de aceleración y varios cientos de libras.
El desventajas del motor de inducción lineal son:
- La construcción de dispositivos LIM es bastante complicada porque requiere sofisticados algoritmos de control.
- Estos dispositivos tienen una mayor fuerza de atracción en el momento de su funcionamiento.
- No muestran ninguna fuerza en el momento de la parada.
- El mayor tamaño físico del dispositivo implica un mayor tamaño de embalaje.
- Requiere más energía para funcionar. En comparación con los motores lineales de imanes permanentes, es menos eficiente y genera más calor. Por ello, es necesario incluir en la construcción dispositivos de refrigeración por agua.
Aplicaciones del motor de inducción lineal
El uso exclusivo de los motores de inducción lineal se encuentra en aplicaciones como
- Cintas transportadoras metálicas
- Equipo de control mecánico
- Actuadores de interruptor de alta velocidad
- Aplicaciones de impulso del transbordador
En general, este artículo está dedicado al concepto de motor de inducción lineal. En este artículo se han explicado claramente los principios, el diseño, el funcionamiento, los usos, las ventajas y los inconvenientes de los motores de inducción lineales. También es necesario conocer la relación entre la velocidad y el paso de los polos características del motor de inducción lineal ¿actuar?
Si quieres conocer otros artículos parecidos a Qué es el motor de inducción lineal: estructura y funcionamiento puedes visitar la categoría Generalidades.
Deja una respuesta
¡Más Contenido!