
Lógica difusa: una forma de lograr el control basado en entradas imprecisas
En la era del control digital, casi todos los dispositivos se controlan usando el nivel de control digital usando 1 y 0. Pero piénselo, ¿no es imposible pensar que cada salida de los procesos que encuentra diariamente depende de solo dos estados de la entrada No, ciertamente. Imagínese a su madre cocinando sabrosos platos y no podrá evitar felicitarla. Entonces, ¿cómo se vuelve tan sabrosa la comida? Con la adición de ingredientes en la cantidad y proporción adecuadas, por supuesto. Entonces, ¿cómo lo maneja? ¿Con un perfecto conocimiento numérico de las cantidades? No siempre. Lo hace con una idea conocida, que viene con la experiencia. De aquí es de donde surge la idea de una lógica de control que utiliza los grados de estado de las entradas en lugar de las propias entradas; lógica que no requiere entradas perfectas sino que funciona solo con una estimación típica de las entradas. Es lógica difusa.
¿Qué es la lógica difusa?
La lógica difusa es un esquema de control básico que se basa en los grados de estado de la entrada y la salida depende del estado de la entrada y la tasa de cambio de ese estado. En otras palabras, un sistema de lógica difusa funciona según el principio de asignar una salida particular en función de la probabilidad del estado de la entrada.
¿Cómo nació la lógica difusa?
La lógica difusa fue desarrollada en 1965 por Lotfi Zadeh de la Universidad de California, Berkley, como un medio para realizar procesos computacionales basados en valores naturales en lugar de valores binarios. Primero se usó como un medio de procesamiento de datos y luego comenzó a usarse como una estrategia de control.
¿Cómo funciona la lógica difusa?
La lógica difusa funciona con el concepto de decidir la salida en función de suposiciones. Funciona sobre la base de conjuntos. Cada conjunto representa variables lingüísticas que definen el posible estado de la salida. Cada estado posible de la entrada y los grados de cambio de estado son parte del conjunto, en función de la salida prevista. Funciona según el principio de If-else-the, es decir, si A Y B Entonces Z.
Supongamos que queremos controlar un sistema donde la salida puede estar en cualquier parte del conjunto X, con un valor genérico x, tal que x pertenece a X. Considere un conjunto particular A que es un subconjunto de X tal que todos los miembros de A pertenecen a el intervalo 0 y 1. El conjunto A se llama conjunto borroso y el valor de fA(x) en x denota el grado de pertenencia de x en este conjunto. La salida se decide en función del grado de pertenencia de x en el conjunto. Esta atribución de pertenencia depende de la asunción de las salidas según las entradas y la tasa de variación de las entradas.
Estos conjuntos borrosos se grafican utilizando funciones de pertenencia y la salida se decide en función del grado de pertenencia en cada parte de la función. La pertenencia de los conjuntos se decide mediante la lógica IF-Else.
Generalmente, las variables del conjunto son el estado de las entradas y los grados de cambio de la entrada y la pertenencia de la salida depende de la lógica de la operación Y el estado de la entrada y la tasa de cambio de entrada. Para un sistema de múltiples entradas, las variables también pueden ser las diferentes entradas y la salida puede ser el posible resultado de la operación AND entre las variables.
Sistema de control difuso
Un sistema de control difuso consta de los siguientes componentes:
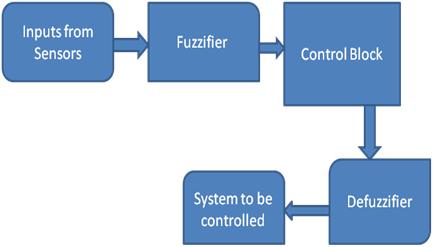
un fuzzificador que transforma variables medidas o de entrada en forma numérica en variables lingüísticas.
un controlador realiza la operación de lógica difusa de asignar salidas en función de la información lingüística. Realiza un razonamiento aproximado basado en la forma humana de interpretación para lograr una lógica de control. El controlador consta de la base de conocimiento y el motor de inferencia. La base de conocimiento está compuesta por funciones de pertenencia y reglas difusas, las cuales se obtienen conociendo el funcionamiento del sistema en función del entorno.
el defuzzificador convierte esta salida difusa en la salida requerida para controlar el sistema.
Un sistema de control simple que utiliza lógica difusa para controlar la velocidad del ventilador en función de la temperatura de entrada.
Suponga que desea controlar la velocidad del ventilador en función de la temperatura ambiente. Para un laico normal, si la temperatura ambiente es tal que hace demasiado calor, la velocidad del ventilador aumenta al valor máximo. Si hace un poco de calor, la velocidad del ventilador aumenta moderadamente. Si hace demasiado frío, la velocidad del ventilador se reduce considerablemente.
Entonces, ¿cómo haces que tu computadora haga esto?
Así es como podemos lograr esto:
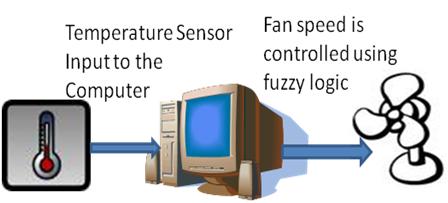
- El sensor de temperatura mide valores de temperatura ambiente. Los valores obtenidos se toman y luego se transmiten al fuzzificador.
- El fuzzificador asigna variables lingüísticas para cada valor medido y la tasa de cambio del valor medido.
Por ejemplo, si el valor medido es de 40⁰C o más, entonces la habitación está demasiado caliente
Si el valor medido está entre 30⁰C y 40⁰C, la habitación está lo suficientemente caliente
Si el valor medido es 22-28⁰C, la habitación es moderada
Si el valor medido es de 10 a 20⁰C, la habitación está fría
Si el valor medido es inferior a 10, la habitación está demasiado fría.
- El siguiente paso se refiere a la operación de la base de conocimientos que contiene la información de estas funciones miembro, así como la base de reglas.
Por ejemplo, si la habitación está demasiado caliente Y se está calentando rápidamente, establezca la velocidad del ventilador en Alta
Si la habitación está demasiado caliente Y se está calentando lentamente, ajuste la velocidad del ventilador a un valor inferior a Alto.
- El siguiente paso es convertir esta variable de salida lingüística en variables numéricas o variables lógicas utilizadas para controlar el controlador del motor del ventilador.
- El paso final es controlar la velocidad del ventilador dando la entrada adecuada al controlador del motor del ventilador.
Así que esta es una breve descripción general de la lógica difusa, se puede agregar cualquier otra entrada.
Si quieres conocer otros artículos parecidos a Lógica difusa: una forma de lograr el control basado en entradas imprecisas puedes visitar la categoría Generalidades.
Deja una respuesta
¡Más Contenido!