
¿Diferencia entre motor de corriente continua, servomotor y motor paso a paso?
La elección del motor adecuado para las distintas aplicaciones depende de ciertos criterios de diseño, como los requisitos de precisión posicional, el coste, la disponibilidad de potencia de accionamiento, el par y los requisitos de aceleración. En general, los motores de corriente continua, los servomotores y los motores paso a paso son los mejores para diferentes aplicaciones. Sin embargo, el motor paso a paso es más adecuado para aplicaciones con alto par de retención y baja aceleración. Mucha gente piensa que hay una gran diferencia entre el motor de corriente continua, el servomotor y el motor paso a paso. Para conocer las diferencias entre estos tres motores, este artículo ofrece una breve descripción.
Diferencia entre un motor de corriente continua, un servomotor y un motor paso a paso
Elegir entre un motor de corriente continua, un servomotor y un motor paso a paso puede ser una tarea bastante desalentadora, que incluye el equilibrio de numerosos factores de diseño, sobre todo el coste, la velocidad, el par, la aceleración e incluso el circuito de accionamiento, que desempeñan un papel esencial en la elección del mejor motor eléctrico para tu aplicación.
Motores de corriente continua
Un motor de corriente continua es un motor de corriente continua de dos hilos, siendo los dos hilos la fuente de alimentación y la tierra. Cuando se aplica la energía, un motor de corriente continua comienza a girar hasta que se retira la energía. La mayoría de los motores de corriente continua funcionan a un número elevado de revoluciones por minuto (RPM), como los ventiladores utilizados en los ordenadores para la refrigeración o las ruedas de los coches controladas por una radio.
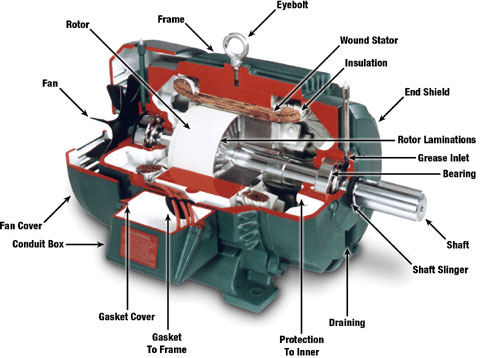
La velocidad del motor de corriente continua puede controlarse mediante PWM (modulación por ancho de pulso), una técnica en la que la fuente de alimentación se conecta y desconecta rápidamente. El porcentaje de tiempo consumido en el ciclo de la relación ON/OFF define la velocidad del motor. Por ejemplo, si la alimentación es del 50%, el motor de corriente continua girará a la mitad de la velocidad del 100%. Cada pulso es tan rápido que el motor parece girar continuamente sin vacilar Consulta el enlace para saber más sobre el funcionamiento, las ventajas y los inconvenientes de los motores de corriente continua
Servomotores
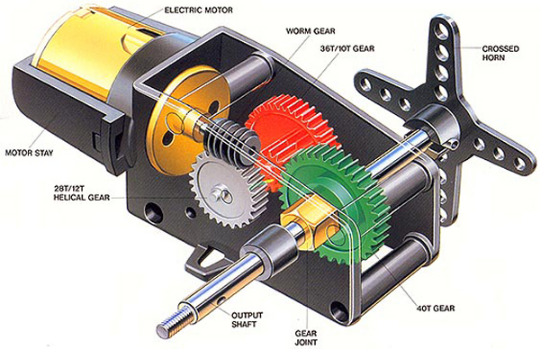
En general, un servomotor es una asociación de cuatro elementos: un motor de corriente continua, un circuito de control, un conjunto de engranajes y un potenciómetro, normalmente un sensor de posición.
La posición de los servomotores puede controlarse con más precisión que la de los típicos motores de corriente continua, y suelen tener tres cables: alimentación, GND y control. La alimentación de estos motores se aplica de forma continua, mientras que el circuito de control del servomotor modifica el consumo de energía para accionar el servomotor. Estos motores están diseñados para tareas más precisas en las que la posición del motor debe definirse con exactitud, como mover un brazo robótico o controlar el timón de una embarcación o una pierna robótica dentro de un rango determinado.
Estos motores no se alternan tan fácilmente como un motor de corriente continua estándar. En cambio, el ángulo de giro es parcial a 1800. Los servomotores reciben una señal de control que indica una posición o/p y aplican potencia al motor de corriente continua hasta que el eje alcanza la posición exacta, determinada por el sensor de posición.
La modulación por ancho de pulsos (PWM) se utiliza para controlar la señal de un servomotor. Sin embargo, a diferencia de los motores de corriente continua, es el periodo del impulso positivo el que controla la posición y no la velocidad del servoeje. El valor del impulso de neutro depende de que el servo mantenga el eje del servomotor en la posición central. Aumentar el valor del pulso hará que el servomotor gire en el sentido de las agujas del reloj, mientras que un pulso más corto hará que el eje gire en sentido contrario.
El pulso de control del servo suele repetirse cada 20 ms y, básicamente, indica al servomotor a dónde debe ir, aunque eso signifique quedarse en la misma posición. Cuando se ordena a un servo que se mueva, se desplazará a la posición y la mantendrá, aunque una fuerza externa empuje contra él. El servomotor se resistirá a salir de esa posición y la fuerza resistiva máxima que puede utilizar el servomotor es igual al par nominal del servomotor
Motores paso a paso
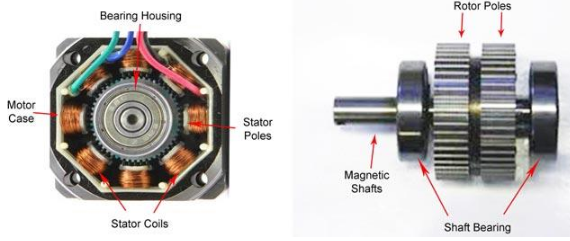
Un motor paso a paso es básicamente un servomotor que utiliza un método diferente de motorización. Mientras que un motor se compone de un motor de corriente continua en rotación y un circuito de control combinado, los motores paso a paso utilizan varios electroimanes dentados dispuestos alrededor de un dispositivo central para describir la posición.
El motor paso a paso necesita un circuito de control externo para excitar cada electroimán por separado y hacer que el eje del motor se active. Cuando el electroimán recibe energía, atrae los dientes del equipo y los sostiene, ligeramente desplazados del siguiente electroimán "B". Cuando "A" se apaga y "B" se enciende, el aparato gira ligeramente para alinearse con "B" y en todo el círculo, con cada electroimán alrededor del aparato siendo energizado y desenergizado a su vez para hacer una rotación. Cada giro de un electroimán al siguiente se denomina "paso" y, por tanto, el motor puede activarse en ángulos de paso predefinidos para una rotación completa de 3600 rpm.
Estos motores se utilizan en dos variantes: unipolar/bipolar. Los motores bipolares son el tipo de motor más robusto y suelen tener 4 u 8 hilos. Tienen dos conjuntos de bobinas electromagnéticas en su interior y el paso se consigue alterando la dirección de la corriente en las bobinas. Los motores unipolares, reconocibles por tener 5 hilos, 6 hilos o incluso 8 hilos, también tienen dos bobinas, pero cada una tiene una toma central. Estos motores pueden pisar sin que el sentido de la corriente en las bobinas sea opuesto, lo que simplifica la electrónica. Sin embargo, como esta toma se utiliza para reforzar sólo la mitad de cada bobina a la vez, suelen tener menos par que las bipolares.
El diseño del motor paso a paso puede proporcionar un par de retención constante sin necesidad de encender el motor, siempre que éste se utilice dentro de sus límites y no se produzcan errores de posicionamiento, ya que estos motores tienen situaciones corporales predefinidas
Ventajas y desventajas de los motores DC, Servo y Stepper
Las ventajas y desventajas de los motores de corriente continua, los servomotores y los motores paso a paso son las siguientes.
- Los motores de corriente continua son motores rápidos y de rotación continua, que se utilizan principalmente para cualquier cosa que tenga que girar a un número elevado de revoluciones por minuto (RPM). Por ejemplo, las ruedas de los coches, los ventiladores, etc.
- Los servomotores son motores de alto par que giran con rapidez y precisión dentro de un ángulo limitado. Suelen ser una alternativa de alto rendimiento a los motores paso a paso, pero son más complicados de configurar con el control PWM. Son adecuados para brazos/piernas robóticas o para el control del timón, etc.
- Los motores paso a paso son lentos, fáciles de configurar, precisos en la rotación y el control - Ventajas sobre otros motores como los servomotores en el control de una posición. Mientras que estos motores requieren un mecanismo de retroalimentación y un circuito de apoyo para su localización, este motor tiene control posicional debido a su naturaleza rotativa con adiciones fraccionarias. Es adecuado para las impresoras 3D y dispositivos relacionados en los que la posición es esencial.
Así que aquí tienes las principales diferencias entre un motor de corriente continua, un servomotor y un motor paso a paso, con sus ventajas e inconvenientes. Esperamos que entiendas mejor este concepto. Además, si tienes alguna duda sobre este concepto o si quieres realizar proyectos eléctricos con motores, danos tu valiosa opinión comentando en la sección de comentarios de abajo. He aquí una pregunta para ti, ¿Cuál es la función de un motor?
Si quieres conocer otros artículos parecidos a ¿Diferencia entre motor de corriente continua, servomotor y motor paso a paso? puedes visitar la categoría Generalidades.
Deja una respuesta
¡Más Contenido!