
Circuito de controlador de motor de puente H con IC de controlador de motor L293d
Los motores de engranajes de CC comunes requieren una corriente superior a 250 mA. Hay muchos circuitos integrados como el microcontrolador ATmega16, el circuito integrado del temporizador 555. Pero el circuito integrado de la serie 74 no puede suministrar esta cantidad de corriente. Cuando el motor está conectado directamente al o/p de los circuitos integrados anteriores, pueden dañarse. Para superar este problema, se necesita un circuito de controlador de motor, que puede actuar como un puente entre los motores anteriores y los circuitos integrados (IC). Hay varias formas de crear un circuito de controlador de motor de puente H, como usar transistores, relés y usar L293D/L298.

Circuito de puente H
El puente AH es un circuito electrónico que permite aplicar un voltaje a través de los terminales de una carga en cualquier dirección. Los circuitos de puente H se usan con frecuencia en robótica y muchas otras aplicaciones para permitir que los motores de CC funcionen hacia adelante y hacia atrás. Estos circuitos de controlador de motor se utilizan principalmente en diferentes convertidores, como convertidores CC-CC, CC-CA, CA-CA y muchos otros tipos de convertidores electrónicos de potencia. En particular, un motor paso a paso bipolar siempre es accionado por un controlador de motor que tiene dos puentes H
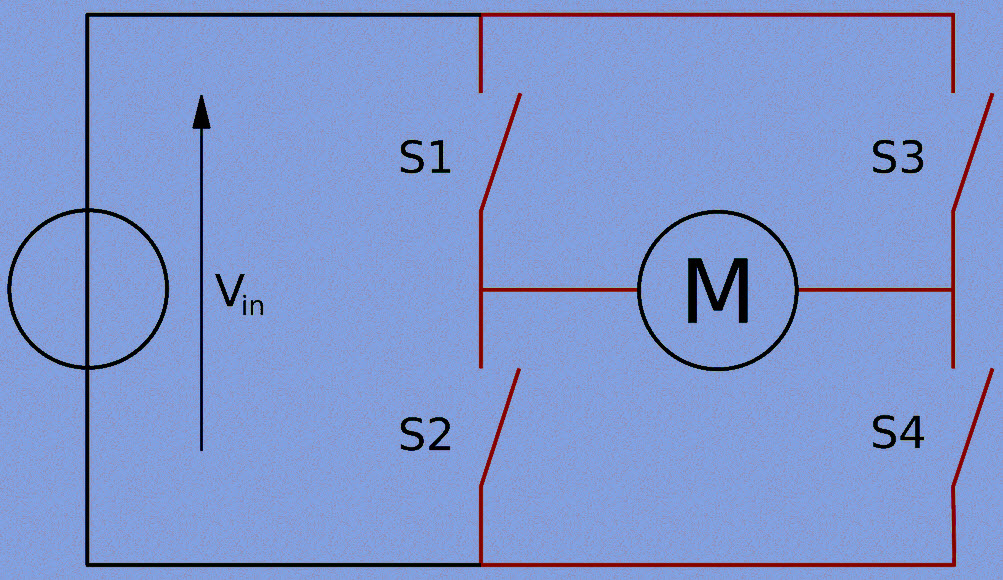
Un puente H está hecho con cuatro interruptores como S1, S2, S3 y S4. Cuando los interruptores S1 y S4 están cerrados, se aplicará un voltaje +ve a las terminales del motor. Al abrir los interruptores S1 y S4 y cerrar los interruptores S2 y S3, este voltaje se invierte, lo que permite la operación inversa del motor.
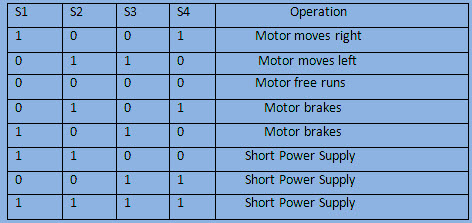
En general, el circuito del controlador del motor del puente H se usa para invertir la dirección del motor y también para romper el motor. Cuando el motor se detiene repentinamente porque los terminales del motor están cortocircuitados. O deje que el motor gire libremente hasta detenerse, cuando el motor esté desconectado del circuito. La siguiente tabla muestra las diferentes operaciones con los cuatro interruptores correspondientes al circuito anterior.
Controlador de motor L293D IC
L293D IC es un IC de controlador de motor típico que permite que el motor de CC funcione en cualquier dirección. Este IC consta de 16 pines que se utilizan para controlar instantáneamente un conjunto de dos motores de CC en cualquier dirección. Esto significa que al usar un L293D IC, podemos controlar dos motores de CC. Además, este IC puede impulsar motores grandes que son pequeños y silenciosos.
Este L293D IC funciona según el principio básico del puente H, este circuito de controlador de motor permite que el voltaje fluya en cualquier dirección. Como sabemos, el voltaje tiene que cambiar de dirección para que el motor de CC gire en ambas direcciones. Por lo tanto, el circuito de puente H que utiliza circuitos integrados L293D es perfecto para impulsar un motor. El exclusivo L293D IC consta de dos circuitos de puente H dentro de los cuales dos motores de CC pueden girar por separado. Generalmente, estos circuitos se utilizan en robótica debido a su tamaño para controlar motores de corriente continua.
Diagrama de pines de un controlador IC de controlador de motor L293D
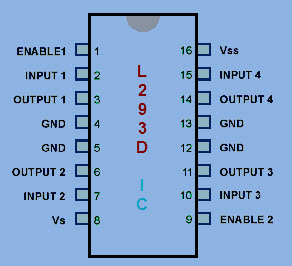
- Pin-1 (Habilitar 1-2): Cuando el pin de habilitación es alto, la parte izquierda del IC funcionará; de lo contrario, no funcionará. Este pin también se llama pin de control maestro.
- Pin-2 (Entrada-1): cuando el pin de entrada es alto, el flujo de corriente pasará a través de la salida 1
- Pin-3 (Salida-1): Este pin-1 de salida debe conectarse a uno de los terminales del motor
- Pin4 y 5: estos pines son pines de tierra
- Pin-6 (Salida-2): Este pin debe conectarse a uno de los terminales del motor.
- Pin-7 (Entrada-2): Cuando este pin es ALTO, la corriente fluirá a través de la Salida 2
- Pin-8 (Vcc2): Este es el pin de voltaje que se utiliza para suministrar voltaje al motor.
- Pin-16 (Vss): Este pin es la fuente de alimentación del circuito integrado.
- Pin-15 (Entrada-4): Cuando este pin está alto, la corriente fluirá a través de la Salida-4.
- Pin-14 (Salida-4): Este pin debe conectarse a uno de los terminales del motor
- Pin-12 y 13: estos pines son pines de tierra
- Pin-11 (Salida-3): Este pin debe conectarse a uno de los terminales del motor.
- Pin-10 (Entrada-3): Cuando este pin es alto, la corriente fluirá a través de la Salida-3
- Pin-9 (Habilitar 3-4): Cuando este pin está alto, la parte derecha del IC funcionará y cuando esté bajo, la parte derecha del IC no funcionará. Este pin también se llama pin de control maestro para la parte derecha del IC.
Circuito de controlador de motor de puente H usando L293d IC
El IC LM293D consta de 4 pines i/p donde, los pines 2 y 7 en el lado izquierdo del IC y los pines 10 y 15 en el lado derecho del IC. Los pines de entrada izquierdos en el IC controlarán la rotación de un motor. Aquí el motor está conectado en el lado y en la i/p derecha para el motor en el lado derecho. Este motor gira según el i/ps que proporcionamos en los pines de entrada como Lógico 0 y Lógico 1.
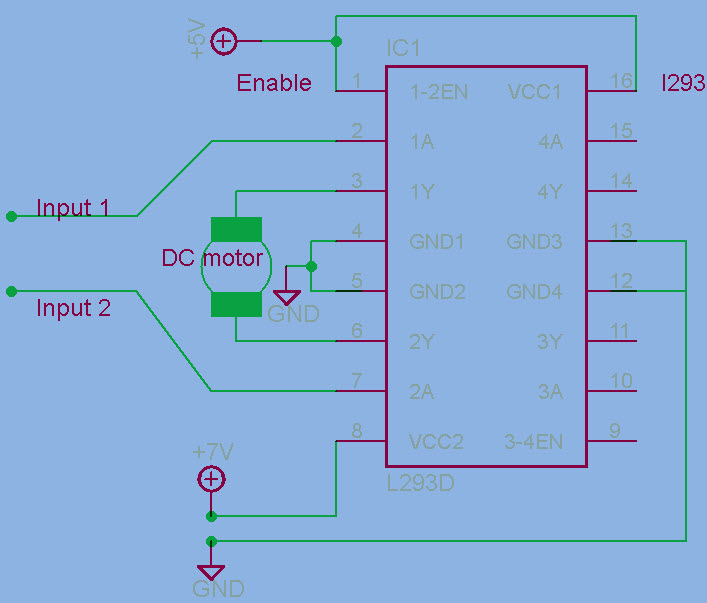
Considere, cuando un motor está conectado a los pines o/p 3 y 6 en el lado izquierdo del IC. Para girar el motor en el sentido de las agujas del reloj, los pines i/p deben contar con 0 lógico y 1 lógico.
Cuando Pin-2 = 1 lógico y pin-7 = 0 lógico, gira en el sentido de las agujas del reloj.
Pin-2 = 0 lógico y Pin7 = 1 lógico, luego gira en sentido antihorario
Pin-2 = 0 lógico y Pin7 = 0 lógico, entonces está inactivo (estado de alta impedancia)
Pin-2 = Lógica 1 y Pin7 = Lógica 1, entonces está inactivo
De manera similar, el motor también puede funcionar con los pines de entrada 15 y 10 para el motor del lado derecho.
El controlador de motor IC L4293D maneja grandes corrientes, por esta razón, este circuito utiliza un disipador de calor para reducir el calor. Por lo tanto, hay 4 pines de tierra en el L293D IC. Cuando soldamos estos pines a la PCB (placa de circuito impreso), podemos obtener una gran área metálica entre los pines de tierra donde se puede generar calor.
Se trata de Circuito de controlador de motor de puente H Usando el circuito integrado L293d. Estos circuitos integrados se utilizan generalmente en robótica. Esperamos que tenga una mejor comprensión del concepto del puente H. Además, si tiene alguna pregunta sobre el controlador de motor del puente H IC l293d o los proyectos eléctricos y electrónicos, comente en la sección de comentarios a continuación. Aquí hay una pregunta para usted, ¿cuál es el propósito del IC de controlador de páramo?
Si quieres conocer otros artículos parecidos a Circuito de controlador de motor de puente H con IC de controlador de motor L293d puedes visitar la categoría Generalidades.
Deja una respuesta
¡Más Contenido!