
Chop o Auto-Zero: esa es la cuestión
Los interruptores son una buena opción para aplicaciones de baja potencia y baja frecuencia (<100 Hz), mientras que los amplificadores de cero automático son mejores para aplicaciones de banda ancha. Una combinación de técnicas de auto-cero y corte es ideal para aplicaciones que requieren poco ruido, sin fallas de conmutación y un ancho de banda amplio.
Amplificadores de deriva cero
Los amplificadores de deriva cero corrigen dinámicamente su voltaje de compensación y remodelan su densidad de ruido. Dos tipos de uso común (amplificadores y cortadores de cero automático) logran compensaciones de nivel de nanovoltios y derivas de compensación extremadamente bajas debido al tiempo y la temperatura. El ruido 1/f del amplificador también se ve como un error de CC; por lo tanto, también se elimina. Los amplificadores de deriva cero brindan muchos beneficios a los diseñadores porque la deriva de temperatura y el ruido 1/f, que siempre son molestias en el sistema, son muy difíciles de eliminar. Además, los amplificadores de deriva cero tienen mayor ganancia de bucle abierto, rechazo de fuente de alimentación y rechazo de modo común en comparación con los amplificadores estándar; y su error de salida general es menor que el obtenido por un amplificador de precisión estándar en la misma configuración.
Aplicaciones para amplificadores de deriva cero
Los amplificadores de deriva cero se usan en sistemas con una vida útil esperada de más de diez años y en cadenas de señales que usan ganancias altas de bucle cerrado (>100) con señales de baja frecuencia (<100 Hz) y bajo nivel de amplitud. Se pueden encontrar ejemplos en básculas de precisión, instrumentación médica, equipos de metrología de precisión e interfaces de sensores infrarrojos, puente y termopila.
Técnica de cero automático
Los amplificadores de cero automático generalmente corrigen el desplazamiento de entrada en dos fases de reloj. Durante la fase A del reloj, los interruptores etiquetados como φA están cerrados, mientras que los interruptores etiquetados como φB están abiertos, como se muestra en el diagrama del AD8571 en la Figura 1. El voltaje de compensación del amplificador anulador se mide y almacena en el condensador CM1.
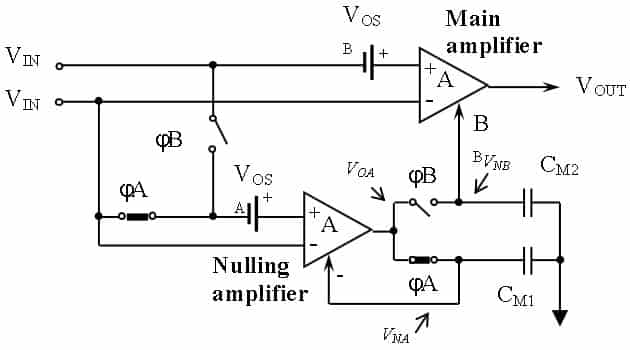
Figura 1. Fase A del amplificador de puesta a cero automática: Fase de anulación.
Durante la fase B del reloj, los interruptores etiquetados como φB están cerrados, mientras que los interruptores etiquetados como φA están abiertos, como se muestra en el diagrama AD8571 en la Figura 2. El voltaje de compensación del amplificador principal se mide y almacena en el condensador CM2mientras que el voltaje almacenado en el condensador CM1 se ajusta para el desplazamiento del amplificador anulador. Luego, la compensación general se aplica al amplificador principal mientras se procesa la señal de entrada.

Figura 2. Fase B del amplificador de cero automático: Fase de cero automático.
La función de muestreo y retención convierte los amplificadores de cero automático en sistemas de datos muestreados, lo que los hace propensos a los efectos de aliasing y fold-back. A bajas frecuencias, el ruido cambia lentamente; por lo tanto, la sustracción de dos muestras de ruido consecutivas da como resultado una cancelación verdadera. A frecuencias más altas, esta correlación disminuye, y los errores de sustracción hacen que los componentes de banda ancha vuelvan a la banda base. Por lo tanto, los amplificadores de cero automático tienen más ruido en banda que los amplificadores operacionales estándar. Para reducir el ruido de baja frecuencia, se debe aumentar la frecuencia de muestreo, pero esto introduce una inyección de carga adicional. La ruta de la señal incluye solo el amplificador principal; por lo tanto, se puede obtener un ancho de banda de ganancia unitaria relativamente grande.
Técnica de corte
La figura 3 muestra el diseño del diagrama de bloques de un amplificador chopper, el ADA4051, que utiliza un circuito de retroalimentación de autocorrección local (ACFB). La ruta de la señal principal incluye una red de corte de entrada (CHOP1), un amplificador de transconductancia (Gm1), una red de corte de salida (CHOP2) y un amplificador de transconductancia (Gm2). CHOP1 y CHOP2 modulan el desplazamiento inicial y el ruido 1/f desde Gm1 hasta la frecuencia de corte. El amplificador de transconductancia, Gm3, detecta la ondulación modulada en la salida de CHOP2. La red de corte, CHOP3, demodula la ondulación de nuevo a CC. Las tres redes de corte conmutan a 40 kHz. Finalmente, el amplificador de transconductancia, Gm4, anula el componente de CC en la salida de Gm1, que de otro modo aparecería como ondulación en la salida general. El filtro de muescas de condensador conmutado (SCNF) suprime selectivamente la ondulación no deseada relacionada con la compensación sin perturbar la entrada deseada. señal de la salida general. Está sincronizado con el chopping clock para filtrar perfectamente los componentes modulados.

Figura 3. Esquema de corte.
Combinando las dos técnicas
El amplificador de deriva cero, como el AD8628 que se muestra en la Figura 4, utiliza la puesta a cero automática y el corte para reducir la energía en la frecuencia de corte, mientras mantiene el ruido muy bajo en las frecuencias más bajas. Esta técnica combinada permite un ancho de banda más amplio que el que es posible con los amplificadores de deriva cero convencionales.

Figura 4. Combinación de Auto-Zero con Chopping para lograr un ancho de banda más amplio.
Diferencias entre la puesta a cero automática y el corte
La puesta a cero automática usa muestreo para corregir el desplazamiento, mientras que el corte usa modulación y demodulación. El muestreo hace que el ruido se repliegue en la banda base; por lo tanto, los amplificadores de cero automático tienen más ruido dentro de la banda. Para suprimir el ruido, se usa más corriente; por lo tanto, los dispositivos generalmente disipan más energía. Los interruptores tienen un ruido de baja frecuencia consistente con su ruido de banda plana pero producen una gran cantidad de energía en la frecuencia de corte y sus armónicos. Es posible que se requiera filtrado de salida; por lo tanto, estos amplificadores son los más adecuados para aplicaciones de baja frecuencia. Las características de ruido típicas de las técnicas de auto-cero y corte se muestran en la Figura 5.

Figura 5. Ruido típico de varias topologías de amplificador frente a frecuencia.
Sugerencia de aplicación
Los amplificadores de deriva cero son amplificadores compuestos que utilizan circuitos digitales para corregir dinámicamente los errores de compensación analógica. Las técnicas de diseño discutidas hasta ahora mejoran enormemente una serie de parámetros del amplificador operacional, incluido el voltaje de compensación, la deriva de compensación con el tiempo y la temperatura, y la forma de la curva de ruido, a expensas de algunos otros. Esta compensación, común en el diseño de amplificadores, es una de las razones por las que no existe un amplificador ideal. Cuando se utilizan amplificadores de deriva cero, los problemas de aplicación que deben tenerse en cuenta incluyen la inyección de carga, el paso del reloj, la distorsión de intermodulación y el tiempo de recuperación de la sobrecarga. La inyección de carga, debido a la acción de conmutación de los interruptores y los amplificadores de cero automático, aparece en las entradas del amplificador. Por ejemplo, si un amplificador de desviación cero se configura en una configuración no inversora como se muestra en la Figura 6, aparecen pequeñas ondas en la salida debido a la acción de conmutación de la entrada.

Figura 6. Ondulación de salida causada por la inyección de carga en función de la frecuencia de entrada.
La magnitud de la inyección de carga es independiente de la temperatura, pero aumenta a medida que aumenta la ganancia del circuito, aumenta la resistencia de la fuente o aumenta la resistencia de ajuste de ganancia. La figura 7 muestra el voltaje de error debido a la inyección de carga frente a la resistencia de la fuente.

Figura 7. Voltaje de compensación frente a resistencia de fuente para el amplificador de cero automático AD8638.
Las soluciones a nivel de aplicación pueden reducir fácilmente la contribución de este error. Algunas formas sugeridas para reducir los efectos de la inyección de carga incluyen
- Agregue un capacitor en la retroalimentación para limitar el ancho de banda de la señal.
- Use resistencias de fuente y retroalimentación más bajas.
- Construya un filtro activo o pasivo después de la etapa de amplificación.
- Agregue una resistencia igual a la combinación en paralelo de Rf y Rs a la entrada no inversora para ayudar a cancelar la IB efecto.
- Utilice un dispositivo, como el ADA4051, que tenga ACFB.
La transmisión del reloj puede ocurrir si el amplificador no está bien diseñado o si utiliza una técnica pura de corte. La Figura 8 muestra los artefactos del reloj interno sobre el espectro de frecuencia.

Figura 8. Artefactos de reloj frente a frecuencia.
Las señales con frecuencias superiores a la frecuencia de cero automático se pueden amplificar. La velocidad de un amplificador con puesta a cero automática depende del producto ganancia-ancho de banda, que depende del amplificador principal, no del amplificador de anulación; la frecuencia de cero automático da una indicación de cuándo comenzarán a producirse artefactos de conmutación. A medida que la entrada se acerca a la frecuencia de corte o cero automático, se introduce la distorsión de intermodulación (IMD) como se muestra en la Figura 9, y se producen errores mayores a medida que la frecuencia de entrada se acerca a la frecuencia del reloj. IMD entre la señal de entrada de alta frecuencia y la frecuencia de corte crea tonos en frecuencias fCORTAR - fEN y fCORTAR + fEN. Mediante la aplicación de técnicas de diseño inteligentes y una combinación de esquemas de corte y puesta a cero automática, la distorsión de intermodulación del AD8628 se reduce en 12 dB en comparación con la familia AD8551.
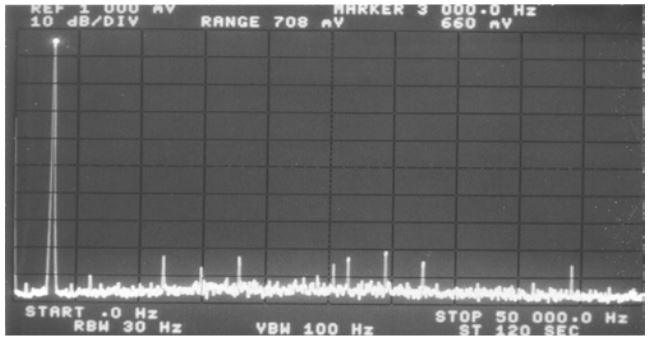
Figura 9. Distorsión de intermodulación.
Una forma de mejorar IMD es usar una frecuencia pseudoaleatoria de cero automático. La familia AD8571, por ejemplo, utiliza un reloj que varía entre 2 kHz y 4 kHz. Otra posibilidad es agregar filtros alrededor del amplificador, como se muestra en la Figura 10, donde se muestra el ruido del reloj antes y después del filtrado. Seleccionar la frecuencia de corte correcta puede mejorar la respuesta del circuito. El tiempo de recuperación de sobrecarga de los amplificadores de deriva cero suele ser más largo que el de los amplificadores CMOS estándar.

Figura 10. Mejora de ruido frente a frecuencia al agregar un filtro.
Si las entradas de un amplificador de cero automático están muy separadas por cualquier motivo, la salida se satura. El amplificador de anulación trata esto como una compensación e intenta anular el error. Esto envía al amplificador principal a una mayor saturación y prolonga el tiempo de recuperación. Los amplificadores como el AD8628 tienen inteligencia integrada que reconoce la sobrecarga, lo que le permite recuperarse en tan solo 30 μs. Los dispositivos sin esta tecnología pueden tardar hasta 40 ms en recuperarse de una condición de sobrecarga.
Selección de un amplificador de deriva cero
Todos los amplificadores de deriva cero ofrecen
- Voltaje de compensación bajo (<10 μV máx.) en todo el VCM
- Deriva de voltaje de compensación muy baja (<40 nV/°C) con el tiempo y la temperatura
- Ruido remodelado que elimina el ruido 1/f
- Ganancia de bucle abierto muy alta, CMRR y PSRR
- Alta impedancia de entrada
- Funcionamiento a temperaturas extremas (hasta 200 °C)
- Sin necesidad de recorte externo
Los interruptores son una buena opción para aplicaciones de baja potencia y baja frecuencia (<100 Hz), mientras que los amplificadores de cero automático son mejores para aplicaciones de banda ancha. Por ejemplo, el AD8628, que combina técnicas de auto-cero y corte, es ideal para aplicaciones que requieren poco ruido, sin fallas de conmutación y ancho de banda amplio. La Tabla 1 muestra algunas de las ventajas y desventajas del diseño.
| Cero automático | Picador estabilizado | Chopper estabilizado y cero automático |
| Compensación muy baja, TCVOS | Compensación muy baja, TCVOS | Compensación muy baja, TCVOS |
| Muestra/retención | mod/demod | Muestra/retención más mod/demod |
| Mayor ruido de baja frecuencia debido al aliasing | Ruido similar a la banda plana (sin aliasing) | Ruido combinado en forma de frecuencia |
| Mayor consumo de energía | Menor consumo de energía | Mayor consumo de energía |
| Amplio ancho de banda | Ancho de banda estrecho | Ancho de banda más amplio |
| ondulación más baja | mayor ondulación | Nivel de ondulación más bajo que cortar |
| Poca energía en la frecuencia de cero automático | Mucha energía en la frecuencia de corte | Poca energía en la frecuencia de cero automático |
Conclusión
Muchos de los viejos mitos sobre los choppers han sido superados por técnicas inteligentes en las ofertas de nuevos productos, y los amplificadores de deriva cero ahora llevan a los amplificadores operacionales más cerca del llamado amplificador ideal. Los ingenieros de sistemas pueden aprovechar los beneficios que brindan estos productos para construir sistemas de súper precisión.
Referencias
“Las mediciones de sensores tipo puente se mejoran con amplificadores de instrumentación con puesta a cero automática”, AnalógicoDiálogo38-02,2004.
“Desmitificando los amplificadores de cero automático-1,” AnalógicoDiálogo34-01, 2000.
“Desmitificando los amplificadores de cero automático-2,” AnalógicoDiálogo34-01, 2000.
Si quieres conocer otros artículos parecidos a Chop o Auto-Zero: esa es la cuestión puedes visitar la categoría Generalidades.
Deja una respuesta
¡Más Contenido!