
Robots seguidores de línea - Control, principio de funcionamiento y aplicaciones
Una breve introducción a un robot:
Un robot es una máquina completamente automática, es decir, que se pone en marcha por sí misma, decide su forma de trabajar y se detiene por sí misma. En realidad es una réplica del ser humano, que ha sido diseñada para aliviar la carga humana. Puede ser controlado neumáticamente o mediante vías hidráulicas o utilizando las sencillas vías de control electrónico. El primer robot industrial fue el Unimates construido por George Devol y Joe Engelberger a finales de los 50 y principios de los 60.
Cualquier robot se basa en 3 leyes básicas definidas por el autor ruso de ciencia ficción Isaac Asimov:
- Un robot no debe dañar al ser humano directa o indirectamente.
- Un robot debe obedecer las órdenes del ser humano, a menos y hasta que viole la primera ley.
- Un robot debe proteger su propia existencia siempre que no se violen las dos primeras leyes.

Los robots pueden ser robots fijos o móviles. Los robots móviles son robots con una base móvil que hace que el robot se mueva libremente por el entorno. Uno de los robots móviles más avanzados es el Robot Seguidor de Línea. Básicamente es un robot que sigue una trayectoria o camino determinado y decide su propio curso de acción que interactúa con los obstáculos. La trayectoria puede ser una línea negra sobre el suelo blanco (visible) o un campo magnético (invisible). Sus aplicaciones van desde los usos domésticos básicos hasta los usos industriales, etc. En la actualidad, en la industria se transportan los paquetes o materiales de un lugar a otro mediante el sistema de grúa. En ocasiones, el levantamiento de grandes pesos puede provocar la rotura de los materiales de elevación y dañar los paquetes. Los robots de seguimiento de líneas se utilizan habitualmente para transportar a los niños por centros comerciales, hogares, lugares de ocio e industrias. El uso del vehículo robótico de seguimiento de líneas es el transporte de materiales de un lugar a otro en las industrias. El movimiento de este robot depende completamente de la pista. El robot puede hacer cualquier cosa que se le indique. Como en las fábricas, todo lo que tienen que hacer para fabricar sus productos es el robot.
Robot seguidor de líneas
Un robot seguidor de líneas es un robot que sigue una determinada trayectoria controlada por un mecanismo de retroalimentación.
Construcción de un robot seguidor de líneas básico:
La construcción de un robot seguidor de líneas básico implica los siguientes pasos.
- Diseñar la parte mecánica o el cuerpo del robot
- Definir la cinemática de los robots
- Diseñar el control del robot
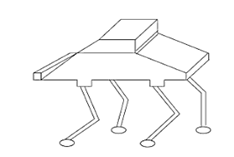
La parte mecánica o cuerpo del robot puede diseñarse utilizando AutoCAD o Workspace. Un robot seguidor de líneas básico puede consistir en una base en cuyos dos extremos se montan las ruedas. Se puede utilizar una lámina rectangular de plástico duro como base. Además, se puede añadir un cuerpo rígido, como un cilindro, junto con otros cuerpos de forma interconectados entre sí mediante articulaciones, y cada uno con su movimiento definido en una dirección determinada. El robot seguidor de línea puede ser un robot móvil con ruedas y base fija, un robot móvil con patas y múltiples cuerpos rígidos interconectados por articulaciones.
El siguiente paso consiste en definir la cinemática del robot. El análisis cinemático del robot implica la descripción de su movimiento con respecto a un sistema de coordenadas fijo. Se ocupa principalmente del movimiento del robot y del movimiento de cada cuerpo en el caso de un robot con patas. Por lo general, implica la dinámica del movimiento del robot. La trayectoria completa del robot se establece mediante el análisis cinemático. Esto puede hacerse con el software Workspace.
El control del robot es el aspecto más importante de su funcionamiento. Aquí el término control se refiere al control del movimiento del robot, es decir, al control del movimiento de las ruedas. Un robot básico seguidor de líneas sigue una determinada trayectoria y el movimiento del robot a lo largo de esta trayectoria se controla mediante el control de la rotación de las ruedas, que están colocadas en los ejes de los dos motores. Así, el control básico se consigue controlando los motores. El circuito de control implica el uso de sensores para detectar la trayectoria y el microcontrolador o cualquier otro dispositivo para controlar el funcionamiento del motor a través de los controladores del motor, basándose en la salida del sensor.
2 Formas de controlar un robot seguidor de línea
- Sin utilizar microcontroladores
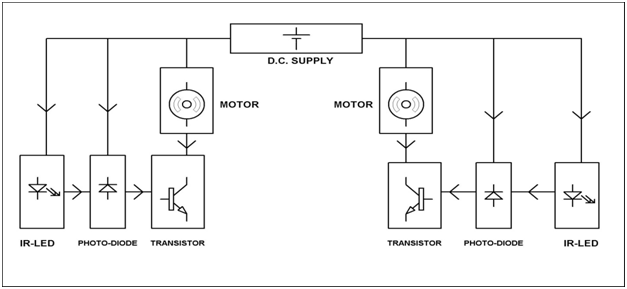
Consiste en una disposición de IR-LED y fotodiodo para cada motor que se controla mediante el encendido y apagado del transistor.
El LED IR, al recibir la polarización adecuada, emite luz infrarroja. Esta luz IR se refleja en el caso de una superficie blanca y la luz IR reflejada incide en el fotodiodo. La resistencia del fotodiodo disminuye, lo que provoca un aumento de la corriente que lo atraviesa y, por tanto, la caída de tensión a través de él. El fotodiodo está conectado a la base del transistor y, como resultado del aumento de la tensión a través del fotodiodo, el transistor empieza a conducir y, por tanto, el motor conectado al colector del transistor recibe suficiente alimentación para empezar a girar. En caso de que haya un color negro en el camino encontrado por una de las disposiciones del sensor, la luz IR no se refleja y el fotodiodo ofrece más resistencia, lo que hace que el transistor deje de conducir y, finalmente, el motor deja de girar.
Así, todo el sistema puede controlarse mediante una simple disposición de LED-Fotodiodo-Transistor.
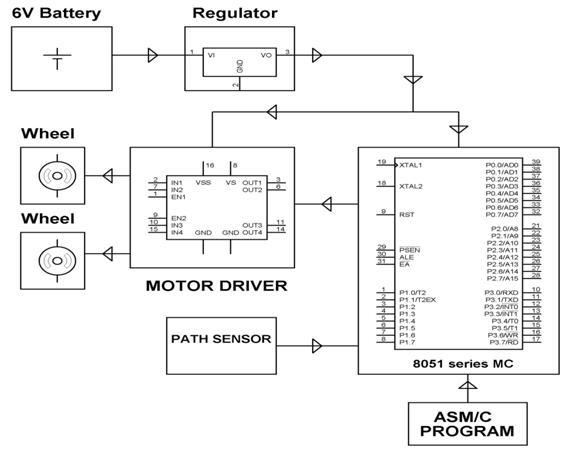
- Con el uso de microcontroladores
Principio de funcionamiento:
El robot de seguimiento de líneas es uno de los robots autónomos. Que detecta y sigue una línea dibujada en el área. La línea se indica mediante una línea blanca sobre una superficie de bloques o una línea de bloques sobre una superficie blanca. Este sistema debe ser detectado por la línea. Esta aplicación depende de los sensores. Aquí utilizamos dos sensores para la detección de la trayectoria. Se trata de un sensor de proximidad y un sensor IR. El sensor de proximidad se utiliza para la detección de la trayectoria y el sensor IR para la detección de obstáculos. Estos sensores están montados en la parte delantera del robot. El microcontrolador es un dispositivo inteligente, todo el circuito está controlado por el microcontrolador.
Diferentes tipos de vehículos robóticos de seguimiento de línea:
Hay dos tipos de vehículos robóticos controlados por línea
- Vehículo robótico móvil controlado por línea
- Vehículo robótico controlado por línea basado en RF
Aplicaciones del robot seguidor de líneas:
- Aplicaciones industriales: Estos robots pueden utilizarse como portaequipos automatizados en las industrias, sustituyendo a las cintas transportadoras tradicionales.
- Aplicaciones en el automóvil: Estos robots también pueden utilizarse como coches automáticos que circulan por las carreteras con imanes incorporados.
- Aplicaciones domésticas: También se pueden utilizar en los hogares para fines domésticos como la limpieza de suelos, etc.
- Aplicaciones orientativas: Se pueden utilizar en lugares públicos como centros comerciales, museos, etc., para guiar el camino.
Ventajas:
- El movimiento del robot es automático
- Se utiliza para aplicaciones de larga distancia
- Simplicidad de construcción
- Sistema de ajuste y olvido
- Se utiliza en el hogar, en los automatismos industriales, etc.
Si quieres conocer otros artículos parecidos a Robots seguidores de línea - Control, principio de funcionamiento y aplicaciones puedes visitar la categoría Generalidades.
Deja una respuesta
¡Más Contenido!