
Qué es un regulador PID : Funcionamiento y sus aplicaciones
Como su nombre indica, este artículo va a dar una idea precisa sobre la estructura y el funcionamiento del controlador PID. Sin embargo, para entrar en detalles, vamos a hacer una introducción sobre los controladores PID. Los controladores PID se encuentran en una amplia gama de aplicaciones para el control de procesos industriales. Aproximadamente el 95% de las operaciones en bucle cerrado del sector de la automatización industrial utilizan controladores PID. PID significa Proporcional-Integral-Derivativo. Estos tres controladores se combinan de forma que producen una señal de control. Como controlador de retroalimentación, proporciona la salida de control a los niveles deseados. Antes de que se inventaran los microprocesadores, el control PID se implementaba mediante componentes electrónicos analógicos. Pero hoy todos los controladores PID son procesados por los microprocesadores. Los controladores lógicos programables también llevan incorporadas las instrucciones del controlador PID. Debido a la flexibilidad y fiabilidad de los controladores PID, éstos se utilizan tradicionalmente en aplicaciones de control de procesos.
¿Qué es un controlador PID?
El término PID significa proporcional integral derivado y es un tipo de dispositivo que se utiliza para controlar diferentes variables del proceso como la presión, el caudal, la temperatura y la velocidad en aplicaciones industriales. En este controlador, se utiliza un dispositivo de retroalimentación del bucle de control para regular todas las variables del proceso.
Este tipo de control se utiliza para conducir un sistema en la dirección de un lugar objetivo o de un nivel. Se encuentra en casi todas partes para el control de la temperatura y se utiliza en los procesos científicos, la automatización y la química en general. En este controlador, se utiliza la retroalimentación en bucle cerrado para mantener la salida real de un método como cerca del objetivo o bien la salida en el punto fijo si es posible. En este artículo, se discute el diseño del controlador PID con los modos de control utilizados en ellos como P, I y D.
Historia
La historia del controlador PID es, En el año 1911, el primer controlador PID fue desarrollado por Elmer Sperry. Después, TIC (Taylor Instrumental Company) implementó un antiguo controlador neumático completamente sintonizable en el año 1933. Al cabo de unos años, los ingenieros de control eliminaron el error de estado estacionario que se encuentra en los controladores proporcionales mediante el reajuste del extremo a algún valor falso hasta que el error no fuera cero.
Este reajuste incluía el error que se conoce como controlador proporcional-integral. Posteriormente, en el año 1940, se desarrolló el primer controlador neumático PID mediante una acción derivativa para reducir los problemas de sobrepasamiento.
En 1942, Ziegler y Nichols introdujeron reglas de sintonización para descubrir y establecer los parámetros adecuados de los controladores PID por parte de los ingenieros. Finalmente, los controladores PID automáticos se utilizaron ampliamente en las industrias a mediados de 1950.
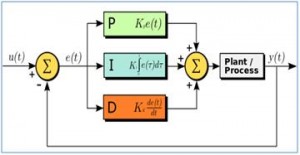
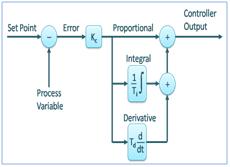
Diagrama de bloques del controlador PID
Un sistema de bucle cerrado como un controlador PID incluye un sistema de control de realimentación. Este sistema evalúa la variable de realimentación mediante un punto fijo para generar una señal de error. En función de ella, modifica la salida del sistema. Este procedimiento continuará hasta que el error llegue a cero, de lo contrario, el valor de la variable de realimentación se convierte en equivalente a un punto fijo.
Este controlador proporciona buenos resultados en comparación con el controlador de tipo ON/OFF. En el controlador de tipo ON/OFF, sólo se pueden obtener dos condiciones para gestionar el sistema. Cuando el valor del proceso es inferior al punto fijo, se pone en ON. Del mismo modo, se apagará cuando el valor sea superior a un valor fijo. La salida no es estable en este tipo de controlador y oscilará con frecuencia en la región del punto fijo. Sin embargo, este regulador es más estable y preciso que el de tipo ON/OFF.
Funcionamiento del regulador PID
Con el uso de un controlador simple ON-OFF de bajo coste, sólo son posibles dos estados de control, como totalmente ON o totalmente OFF. Se utiliza para una aplicación de control limitada en la que estos dos estados de control son suficientes para el objetivo de control. Sin embargo, la naturaleza oscilante de este control limita su uso, por lo que está siendo sustituido por controladores PID.
El controlador PID mantiene la salida de forma que haya un error cero entre la variable del proceso y la consigna/salida deseada mediante operaciones en bucle cerrado. El PID utiliza tres comportamientos básicos de control que se explican a continuación.
Controlador P
El controlador proporcional o P- da una salida proporcional al error de corriente e
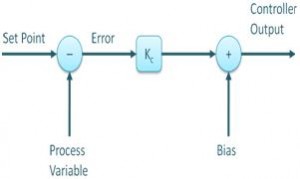
Este controlador requiere una polarización o un reinicio manual cuando se utiliza solo. Esto se debe a que nunca alcanza la condición de estado estacionario. Proporciona un funcionamiento estable, pero siempre mantiene el error de estado estacionario. La velocidad de respuesta se incrementa cuando aumenta la constante proporcional Kc.
Controlador I
Debido a la limitación del controlador p, en el que siempre existe un desfase entre la variable del proceso y el punto de consigna, se necesita el controlador I, que proporciona la acción necesaria para eliminar el error de estado estacionario. Integra el error durante un periodo de tiempo hasta que el valor del error llega a cero. Mantiene el valor del dispositivo de control final en el que el error se hace cero.

El control integral disminuye su salida cuando se produce un error negativo. Limita la velocidad de respuesta y afecta a la estabilidad del sistema. La velocidad de la respuesta se aumenta disminuyendo la ganancia integral, Ki.
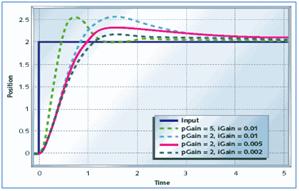
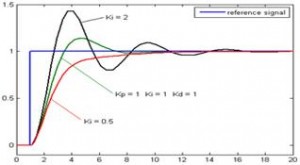
En la figura anterior, a medida que disminuye la ganancia del controlador I, el error en estado estacionario también va disminuyendo. En la mayoría de los casos, el controlador PI se utiliza sobre todo cuando no se requiere una respuesta de alta velocidad.
Cuando se utiliza el controlador PI, la salida del controlador I se limita a un cierto rango para superar el el bobinado integral donde la salida integral sigue aumentando incluso en el estado de error cero, debido a las no linealidades de la planta.
Controlador D
El controlador I no tiene la capacidad de predecir el comportamiento futuro del error. Por eso reacciona normalmente cuando se modifica el punto de consigna. El controlador D supera este problema anticipando el comportamiento futuro del error. Su salida depende de la tasa de cambio del error con respecto al tiempo, multiplicada por la constante de derivación. Da el pistoletazo de salida aumentando así la respuesta del sistema.
En la figura anterior la respuesta del controlador D es mayor, en comparación con el controlador PI, y también disminuye el tiempo de estabilización de la salida. Mejora la estabilidad del sistema al compensar el desfase causado por el controlador I. El aumento de la ganancia de la derivada aumenta la velocidad de respuesta.
Así que finalmente observamos que combinando estos tres controladores, podemos obtener la respuesta deseada para el sistema. Diferentes fabricantes diseñan diferentes algoritmos PID.
Tipos de controladores PID
Los controladores PID se clasifican en tres tipos: ON/OFF, proporcional y de tipo estándar. Estos controladores se utilizan en función del sistema de control, el usuario puede utilizar el controlador para regular el método.
Control ON/OFF
Un método de control ON/OFF es el tipo más sencillo de dispositivo utilizado para el control de la temperatura. La salida del dispositivo puede estar en ON/OFF a través de un estado no central. Este controlador pondrá en ON la salida simplemente cuando la temperatura cruce el punto fijo. Un controlador de límite es un tipo particular de controlador ON/OFF que utiliza un relé de enclavamiento. Este relé se restablece manualmente y se utiliza para desactivar un método una vez que se alcanza una determinada temperatura.
Control proporcional
Este tipo de controlador está diseñado para eliminar el ciclo que se conecta a través del control ON/OFF. Este controlador PID reducirá la potencia normal que se suministra al calentador una vez que la temperatura alcance el punto fijo.
Este controlador tiene una función para controlar el calentador de modo que no supere el punto fijo, aunque sí lo alcance para mantener una temperatura estable.
Este acto de proporcionalidad puede lograrse mediante la conexión y desconexión de la salida durante pequeños periodos de tiempo. Esta proporción de tiempo cambiará la relación entre el tiempo de encendido y el tiempo de apagado para controlar la temperatura.
Controlador PID de tipo estándar
Este tipo de controlador PID combinará el control proporcional con el control integral y derivativo para ayudar automáticamente a la unidad a compensar las modificaciones dentro del sistema. Estas modificaciones, integral y derivativa, se expresan en unidades basadas en el tiempo.
Estos controladores también se denominan a través de sus recíprocos, RATE y RESET correspondientemente. Los términos del PID deben ajustarse por separado o, de lo contrario, sintonizarse con un sistema específico con el ensayo y el error. Estos controladores ofrecen el control más preciso y estable de los 3 tipos de controladores.
Controladores PID en tiempo real
En la actualidad, hay varios tipos de controladores PID disponibles en el mercado. Estos controladores se utilizan para requisitos de control industrial como la presión, la temperatura, el nivel y el caudal. Una vez que estos parámetros se controlan mediante PID, las opciones comprenden utilizar un controlador PID independiente o bien un PLC.
Estos controladores separados se emplean siempre que se requiera la comprobación de uno o dos lazos, así como su control, o en las condiciones en las que es complejo el derecho de entrada a través de sistemas más grandes.
Estos dispositivos de control proporcionan diferentes opciones para el control de bucle único y doble. Los controladores PID de tipo autónomo proporcionan varias configuraciones de punto fijo para producir las diversas alarmas autónomas.
Estos controladores autónomos comprenden principalmente los controladores PID de Honeywell, los controladores de temperatura de Yokogawa, los controladores de autoajuste de OMEGA, Siemens y los controladores de ABB.
Los PLC se utilizan como controladores PID en la mayoría de las aplicaciones de control industrial La disposición de los bloques PID puede hacerse dentro de los PAC o los PLC para dar opciones superiores para un control exacto del PLC. Estos controladores son más inteligentes y potentes en comparación con los controladores independientes. Cada PLC incluye el bloque PID dentro de la programación del software.
Métodos de ajuste
Antes de que funcione el controlador PID, hay que ajustarlo para que se adapte a la dinámica del proceso a controlar. Los diseñadores dan los valores por defecto para los términos P, I y D, y estos valores no pueden dar el rendimiento deseado y a veces conducen a la inestabilidad y a la lentitud del control. Se han desarrollado diferentes tipos de métodos de ajuste para sintonizar los controladores PID y requieren mucha atención por parte del operador para seleccionar los mejores valores de las ganancias proporcional, integral y derivativa. A continuación se indican algunos de ellos.
Los controladores PID se utilizan en la mayoría de las aplicaciones industriales, pero hay que conocer la configuración de este controlador para ajustarlo correctamente y generar la salida preferida. En este caso, la sintonización no es más que el procedimiento para recibir una respuesta ideal del controlador mediante el ajuste de las mejores ganancias proporcionales, factores integrales y derivados.
La salida deseada del controlador PID puede obtenerse mediante la sintonización del controlador. Existen diferentes técnicas para obtener la salida deseada del controlador, como prueba y error, Zeigler-Nichols y curva de reacción del proceso. Los métodos más utilizados son prueba y error, Zeigler-Nichols, etc.
Método de prueba y error Es un método sencillo de ajuste del controlador PID. Mientras el sistema o el controlador están funcionando, podemos afinar el controlador. En este método, primero tenemos que poner a cero los valores de Ki y Kd y aumentar el término proporcional (Kp) hasta que el sistema alcance un comportamiento oscilante. Una vez que oscile, ajusta Ki (término integral) para que las oscilaciones cesen y, por último, ajusta D para conseguir una respuesta rápida.
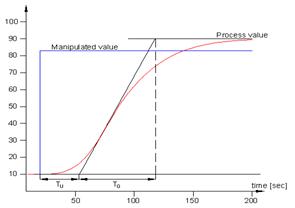
Técnica de la curva de reacción del proceso Es una técnica de ajuste en bucle abierto. Produce una respuesta cuando se aplica una entrada escalonada al sistema. Inicialmente, hay que aplicar manualmente una salida de control al sistema y registrar la curva de respuesta.
Después, tenemos que calcular la pendiente, el tiempo muerto y el tiempo de subida de la curva, y finalmente sustituir estos valores en las ecuaciones P, I y D para obtener los valores de ganancia de los términos PID.
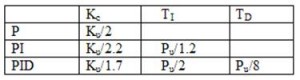
Método Zeigler-Nichols Zeigler-Nichols propuso métodos de lazo cerrado para ajustar el controlador PID. Son el método del ciclo continuo y el método de la oscilación amortiguada. Los procedimientos de ambos métodos son los mismos, pero el comportamiento de la oscilación es diferente. En éste, primero hay que ajustar la constante del controlador p, Kp, a un valor determinado mientras los valores Ki y Kd son cero. Se aumenta la ganancia proporcional hasta que el sistema oscile con una amplitud constante.
La ganancia a la que el sistema produce oscilaciones constantes se llama ganancia final (Ku) y el periodo de las oscilaciones se llama periodo final (Pc). Una vez alcanzado, podemos introducir los valores de P, I y D en el controlador PID mediante la tabla de Zeigler-Nichols, que depende del controlador utilizado como P, PI o PID, como se muestra a continuación.
Estructura del regulador PID
El controlador PID consta de tres términos: control proporcional, integral y derivativo. El funcionamiento combinado de estos tres controladores da lugar a una estrategia de control del proceso. El controlador PID manipula las variables del proceso como la presión, la velocidad, la temperatura, el caudal, etc. Algunas aplicaciones utilizan los controladores PID en redes en cascada, donde se utilizan dos o más PID para conseguir el control.
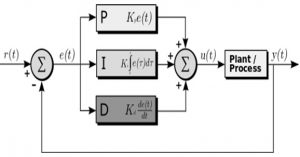
La figura anterior muestra la estructura del controlador PID. Consta de un bloque PID que da su salida al bloque de proceso. El proceso/planta consta de dispositivos de control final como actuadores, válvulas de control y otros dispositivos de control para controlar diversos procesos de la industria/planta.
Una señal de realimentación de la planta de proceso se compara con un punto de consigna o señal de referencia u
Todas las aplicaciones de control no necesitan los tres elementos de control. Las combinaciones como los controles PI y PD se utilizan muy a menudo en aplicaciones prácticas.
Aplicaciones
Las aplicaciones del regulador PID son las siguientes
La mejor aplicación del controlador PID es el control de la temperatura, en el que el controlador utiliza una entrada de un sensor de temperatura y su salida se puede aliar a un elemento de control como un ventilador o un calentador. Por lo general, este controlador es simplemente un elemento de un sistema de control de la temperatura. Hay que examinar todo el sistema y tenerlo en cuenta a la hora de elegir el controlador adecuado.
Control de la temperatura del horno
Generalmente, los hornos se utilizan para incluir el calentamiento, así como para mantener una gran cantidad de materia prima a enormes temperaturas. Es habitual que el material ocupado incluya una masa enorme. En consecuencia, se necesita una gran cantidad de inercia y la temperatura del material no se modifica rápidamente aunque se aplique un calor enorme. Esta característica da lugar a una señal fotovoltaica moderadamente estable y permite que el periodo de derivación corrija eficazmente el fallo sin que se produzcan cambios extremos en el FCE o el CO.
Controlador de carga MPPT
La característica V-I de una célula fotovoltaica depende principalmente del rango de temperatura así como de la irradiación. Según las condiciones meteorológicas, la corriente y la tensión de funcionamiento cambiarán constantemente. Por lo tanto, es muy importante seguir el máximo punto de potencia de un sistema fotovoltaico eficiente. El controlador PID se utiliza para encontrar el MPPT dando puntos fijos de tensión y corriente al controlador PID. Una vez que las condiciones meteorológicas cambian, el rastreador mantiene estables la corriente y la tensión.
El convertidor de la electrónica de potencia
Sabemos que el convertidor es una aplicación de la electrónica de potencia, por lo que en los convertidores se utiliza principalmente un controlador PID. Siempre que un convertidor se alíe a través de un sistema basado en el cambio dentro de la carga, entonces la salida del convertidor cambiará. Por ejemplo, un convertidor está aliado con la carga; la corriente enorme se suministra una vez que las cargas aumentan. Por tanto, el parámetro de la tensión y la corriente no es estable, sino que se modifica en función de las necesidades.
En este estado, este controlador generará señales PWM para activar los IGBT del inversor. En función del cambio en la carga, se proporciona la señal de respuesta al controlador PID para que produzca n error. Estas señales se generan en función de la señal de fallo. En este estado, podemos obtener una entrada y una salida cambiantes a través de un inversor similar.
Aplicación del controlador PID: Control de bucle cerrado para un motor de corriente continua sin escobillas
Interfaz del controlador PID
El diseño y la interconexión del controlador PID pueden realizarse utilizando el microcontrolador Arduino. En el laboratorio, el controlador PID basado en Arduino se diseña utilizando la placa Arduino UNO, componentes electrónicos, refrigerador termoeléctrico, mientras que los lenguajes de programación de software utilizados en este sistema son C o C++. Este sistema se utiliza para controlar la temperatura dentro del laboratorio.
Los parámetros del PID para un controlador específico se encuentran físicamente. La función de los distintos parámetros del PID puede implementarse mediante el posterior contraste entre las distintas formas de controladores.
Este sistema de interconexión puede calcular eficazmente la temperatura a través de un error de ± 0,6℃, mientras que una temperatura constante se regula simplemente a través de una pequeña diferencia del valor preferido. Los conceptos utilizados en este sistema proporcionarán técnicas baratas y exactas para gestionar los parámetros físicos en un rango preferido dentro del laboratorio.
Así pues, este artículo trata una visión general del controlador PID que incluye la historia, el diagrama de bloques, la estructura, los tipos, el funcionamiento, los métodos de ajuste, la interconexión, las ventajas y las aplicaciones. Esperamos haber podido proporcionar conocimientos básicos pero precisos sobre los controladores PID. He aquí una sencilla pregunta para todos vosotros. Entre los distintos métodos de ajuste, ¿qué método se utiliza preferentemente para conseguir un funcionamiento óptimo del regulador PID y por qué?
Os pedimos que tengáis la amabilidad de dar vuestras respuestas en la sección de comentarios de abajo.
Créditos de las fotos
Diagrama de bloques del controlador PID por wikimedia
Estructura del controlador PID, controlador P, respuesta del controlador P y controlador PID por blog.opticontrols
P - respuesta del controlador por controles.engin.umich
Respuesta del controlador PID por wikimedia
Mesa Zeigler-Nichols de controles.motor
Si quieres conocer otros artículos parecidos a Qué es un regulador PID : Funcionamiento y sus aplicaciones puedes visitar la categoría Generalidades.
Deja una respuesta
¡Más Contenido!