
Qué es un motor paso a paso : Tipos y su funcionamiento
Un motor paso a paso es un dispositivo electromecánico que convierte la energía eléctrica en energía mecánica. Además, es un motor eléctrico síncrono sin escobillas que puede dividir una rotación completa en un número amplio de pasos. La posición del motor puede controlarse con precisión sin ningún mecanismo de retroalimentación, siempre que el motor esté cuidadosamente dimensionado para la aplicación. Los motores paso a paso son similares a los motores de reluctancia conmutada. El motor paso a paso utiliza la teoría de funcionamiento de los imanes para hacer que el eje del motor gire una distancia precisa cuando se le proporciona un impulso de electricidad. El estator tiene ocho polos y el rotor seis. El rotor necesitará 24 impulsos de electricidad para mover los 24 pasos para hacer una revolución completa. Otra forma de decir esto es que el rotor se moverá exactamente 15º por cada impulso de electricidad que reciba el motor.
-
Construcción y principio de funcionamiento
- Circuito de motor paso a paso y su funcionamiento
- Tipos de motores paso a paso
- Control del motor paso a paso mediante la variación de los pulsos del reloj
- Diferencia entre el motor paso a paso y el servomotor
- Interfaz del motor paso a paso con el microcontrolador 8051
- Ventajas
- Desventajas
- Aplicaciones
Construcción y principio de funcionamiento
El construcción de un motor paso a paso está bastante relacionada con un motor de corriente continua. Incluye un imán permanente como rotor que está en el centro y que girará una vez que la fuerza actúe sobre él. Este rotor está encerrado por un número de estator que se enrolla a través de una bobina magnética sobre él. El estator está dispuesto cerca del rotor para que los campos magnéticos del estator puedan controlar el movimiento del rotor.
El motor paso a paso se puede controlar energizando cada estator uno por uno. Así, el estator se magnetizará y funcionará como un polo electromagnético que utiliza la energía de repulsión en el rotor para avanzar. La magnetización y desmagnetización alternativas del estator desplazarán el rotor gradualmente y le permitirán girar con gran control.
El principio de funcionamiento del motor paso a paso es el electromagnetismo. Incluye un rotor que está hecho con un imán permanente, mientras que el estator está hecho con electroimanes. Una vez que se alimenta el devanado del estator, se desarrolla el campo magnético dentro del estator. Ahora el rotor del motor comenzará a moverse con el campo magnético giratorio del estator. Este es el principio de funcionamiento fundamental de este motor.

En este motor, hay un hierro blando que se encierra a través de los estatores electromagnéticos. Los polos del estator y del rotor no dependen del tipo de motor paso a paso. Una vez que los estatores de este motor se energizan, el rotor girará para alinearse con el estator o, de lo contrario, girará para tener la menor separación a través del estator. De este modo, los estatores se activan en serie para hacer girar el motor paso a paso.
Técnicas de accionamiento
Técnica de accionamiento del motor paso a pasos puede ser posible con algunos circuitos especiales debido a su complejo diseño. Existen varios métodos para accionar este motor, algunos de los cuales se comentan a continuación tomando como ejemplo un motor paso a paso de cuatro fases.
Modo de excitación simple
El método básico para accionar un motor paso a paso es el modo de excitación simple. Es un método antiguo y poco utilizado en la actualidad, pero hay que conocer esta técnica. En esta técnica, cada fase, por lo demás, del estator que se encuentra junto a la otra, se activará una a una alternativamente con un circuito especial. Esto magnetizará y desmagnetizará el estator para hacer avanzar el rotor.
Accionamiento de paso completo
En esta técnica, se activan dos estatores a la vez en lugar de uno en un periodo de tiempo muy reducido. Esta técnica da lugar a un par elevado y permite que el motor conduzca una carga elevada.
Accionamiento de medio paso
Esta técnica está bastante relacionada con el accionamiento de paso completo, ya que los dos estatores se dispondrán uno al lado del otro, de modo que se activará primero, mientras que el tercero se activará después. Este tipo de ciclo para conmutar dos estatores primero y después el tercer estator accionará el motor. Esta técnica permitirá mejorar la resolución del motor paso a paso, al tiempo que se reduce el par.
Micropaso
Esta técnica es la más utilizada debido a su precisión. La corriente de paso variable será suministrada por el circuito conductor del motor paso a paso hacia las bobinas del estator en forma de onda sinusoidal. La precisión de cada paso puede mejorarse con esta pequeña corriente de paso. Esta técnica se utiliza mucho porque proporciona una gran precisión y disminuye en gran medida el ruido de funcionamiento.
Circuito de motor paso a paso y su funcionamiento
Los motores paso a paso funcionan de forma diferente a los motores de escobillas de corriente continua, que giran cuando se aplica tensión a sus terminales. Los motores paso a paso, en cambio, tienen efectivamente múltiples electroimanes dentados dispuestos alrededor de una pieza central de hierro en forma de engranaje. Los electroimanes se activan mediante un circuito de control externo, por ejemplo, un microcontrolador.
Para hacer girar el eje del motor, primero se da energía a un electroimán, lo que hace que los dientes del engranaje sean atraídos magnéticamente por los dientes del electroimán. En el momento en que los dientes del engranaje están así alineados con el primer electroimán, están ligeramente desplazados con respecto al siguiente electroimán. Así, cuando el siguiente electroimán se enciende y el primero se apaga, el engranaje gira ligeramente para alinearse con el siguiente y a partir de ahí se repite el proceso. Cada una de esas ligeras rotaciones se denomina paso, y un número entero de pasos constituye una rotación completa.
De este modo, el motor puede girar de forma precisa. Los motores paso a paso no giran continuamente, sino que lo hacen por pasos. Hay 4 bobinas con un ángulo de 90o ángulo entre sí fijado en el estator. Las conexiones del motor paso a paso están determinadas por la forma en que se interconectan las bobinas. En un motor paso a paso, las bobinas no están conectadas. El motor tiene un ángulo de 90o paso de rotación con las bobinas energizadas en un orden cíclico, determinando el sentido de rotación del eje.
El funcionamiento de este motor se muestra accionando el interruptor. Las bobinas se activan en serie en intervalos de 1 segundo. El eje gira 90o cada vez que se activa la siguiente bobina. Su par de baja velocidad variará directamente con la corriente.
Tipos de motores paso a paso
Hay tres tipos principales de motores paso a paso, que son
- Motores paso a paso de imán permanente
- Paso a paso síncrono híbrido
- Paso a paso de reluctancia variable
Motor paso a paso de imanes permanentes
Los motores de imanes permanentes utilizan un imán permanente (PM) en el rotor y funcionan por atracción o repulsión entre el PM del rotor y los electroimanes del estator.
Este es el tipo más común de motor paso a paso en comparación con los diferentes tipos de motores paso a paso disponibles en el mercado. Este motor incluye imanes permanentes en su construcción. Este tipo de motor también se conoce como motor de lata/pila de lata. La principal ventaja de este motor paso a paso es su menor coste de fabricación. Por cada revolución, tiene 48-24 pasos.
Motor paso a paso de reluctancia variable
Los motores de reluctancia variable (VR) tienen un rotor de hierro liso y funcionan según el principio de que la reluctancia mínima se produce con una separación mínima, por lo que los puntos del rotor son atraídos hacia los polos del imán del estator.
El motor paso a paso de reluctancia variable es el tipo básico de motor y se utiliza desde hace muchos años. Como su nombre indica, la posición angular del rotor depende principalmente de la reluctancia del circuito magnético que puede formarse entre los dientes del estator y del rotor.
Motor paso a paso síncrono híbrido
Los motores paso a paso híbridos reciben este nombre porque utilizan una combinación de técnicas de imanes permanentes (PM) y de reluctancia variable (VR) para conseguir la máxima potencia en paquetes de pequeño tamaño.
El tipo de motor más popular es el motor paso a paso híbrido porque ofrece un buen rendimiento en comparación con un rotor de imán permanente en términos de velocidad, resolución de pasos y par de retención. Pero este tipo de motor paso a paso es caro en comparación con los motores paso a paso de imán permanente. Este motor combina las características de los motores paso a paso de imán permanente y de reluctancia variable. Estos motores se utilizan cuando se requiere un ángulo de paso menor, como 1,5, 1,8 y 2,5 grados.
¿Cómo elegir un motor paso a paso?
Antes de seleccionar un motor paso a paso para tus necesidades, es muy importante examinar la curva par-velocidad del motor. El diseñador del motor dispone de esta información, que es un símbolo gráfico del par del motor a una velocidad determinada. La curva par-velocidad del motor debe coincidir con las necesidades de la aplicación; de lo contrario, no se podrá obtener el rendimiento esperado del sistema.
Tipos de cableado
Los motores paso a paso suelen ser motores bifásicos, como los unipolares o los bipolares. Para cada fase en un motor unipolar, hay dos devanados. En este caso, la toma central es un cable común entre dos devanados hacia un polo. El motor unipolar tiene de 5 a 8 conductores.
En la construcción, en la que el común de dos polos se divide sin embargo con toma central, este motor paso a paso incluye seis cables. Si las derivaciones centrales de los dos polos son cortas por dentro, este motor incluye cinco cables. El unipolar con 8 cables facilita la conexión en serie y en paralelo, mientras que el motor con cinco o seis cables tiene la conexión en serie de la bobina del estator. El funcionamiento del motor unipolar puede simplificarse porque, al hacerlo, no es necesario invertir el flujo de corriente dentro del circuito de accionamiento que se conoce como motor bifilar.
En un motor paso a paso bipolar, para cada polo hay un único devanado. El sentido de la alimentación tiene que cambiar a través del circuito de accionamiento, por lo que se hace complejo, por lo que estos motores se denominan motores unifilares.
Control del motor paso a paso mediante la variación de los pulsos del reloj
El circuito de control del motor paso a paso es un circuito sencillo y de bajo coste, utilizado principalmente en aplicaciones de baja potencia. El circuito se muestra en la figura, que consiste en un CI de 555 temporizadores como multivibrador estable. La frecuencia se calcula utilizando la relación dada.
Frecuencia = 1/T = 1,45/(RA + 2RB)C Donde RA = RB = R2 = R3 = 4,7 kilo-ohmios y C = C2 = 100 µF.
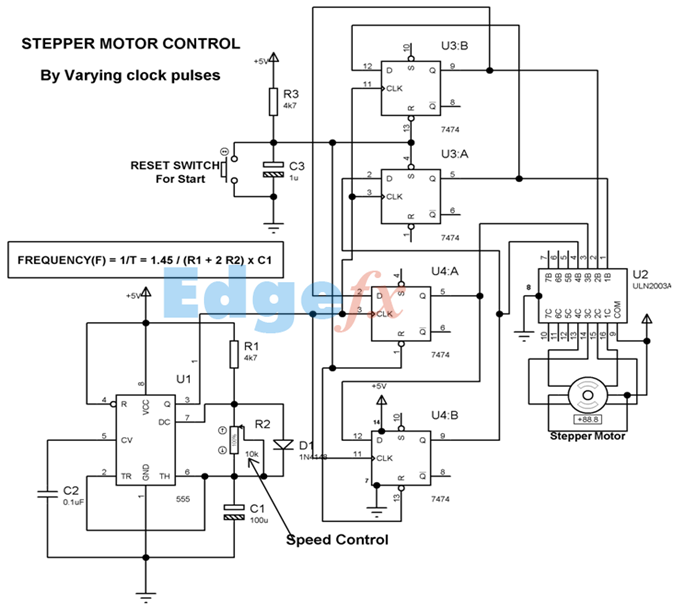
La salida del temporizador se utiliza como reloj para dos flip-flops 7474 de doble "D" (U4 y U3) configurados como contador en anillo. Cuando se enciende inicialmente, sólo se activa el primer flip-flop (es decir, la salida de Q en el pin 5 de U3 estará en '1' lógico) y los otros tres flip-flops se reinician (es decir, la salida de Q está en 0 lógico). Al recibir un pulso de reloj, la salida "1" lógico del primer flip-flop se desplaza al segundo flip-flop (patilla 9 de U3).
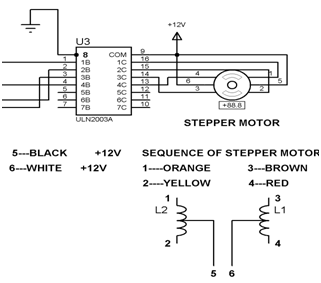
Así, la salida lógica 1 se desplaza circularmente con cada impulso de reloj. Las salidas Q de los cuatro flip-flops se amplifican mediante conjuntos de transistores Darling-ton dentro del ULN2003 (U2) y se conectan a los devanados del motor paso a paso naranja, marrón, amarillo, negro a 16, 15,14, 13 del ULN2003 y el rojo a la alimentación +ve.
El punto común del bobinado se conecta a la alimentación de +12V CC, que también se conecta al pin 9 del ULN2003. El código de colores utilizado para los bobinados puede variar de una marca a otra. Cuando se enciende la alimentación, la señal de control conectada a la patilla SET del primer flip-flop y a las patillas CLR de los otros tres flip-flops pasa a "bajo" activo (debido al circuito de reinicio de la alimentación formado por la combinación R1-C1) para activar el primer flip-flop y reiniciar los tres flip-flops restantes.
Al restablecerse, Q1 de IC3 se pone en "alto", mientras que todas las demás salidas Q se ponen en "bajo". Se puede activar un reinicio externo pulsando el interruptor de reinicio. Al pulsar el interruptor de reinicio, puedes detener el motor paso a paso. El motor vuelve a girar en la misma dirección al soltar el interruptor de reinicio.
Diferencia entre el motor paso a paso y el servomotor
Los servomotores son adecuados para aplicaciones de alto par y velocidad, mientras que el motor paso a paso es menos costoso, por lo que se utilizan cuando se requiere un alto par de retención, una aceleración de baja a media y una flexibilidad de funcionamiento en bucle abierto o cerrado. La diferencia entre el motor paso a paso y el servomotor es la siguiente
| Motor paso a paso |
Servomotor |
| El motor que se mueve en pasos discretos se conoce como motor paso a paso. | Un servomotor es un tipo de motor de bucle cerrado que se conecta a un codificador para proporcionar retroalimentación de velocidad y posición. |
| El motor paso a paso se utiliza cuando el control, así como la precisión, son las principales prioridades | El servomotor se utiliza cuando la velocidad es la principal prioridad |
| El número total de polos del motor paso a paso oscila entre 50 y 100 | El número total de polos del servomotor oscila entre 4 y 12 |
| En un sistema de bucle cerrado, estos motores se mueven con un impulso constante | Estos motores necesitan un codificador que cambie los impulsos para controlar la posición. |
| El par es alto a menor velocidad | El par es bajo en alta velocidad |
| El tiempo de posicionamiento es más rápido en las carreras cortas | El tiempo de posicionamiento es más rápido en las carreras largas |
| Movimiento de inercia de alta tolerancia | Movimiento de inercia de baja tolerancia |
| Este motor es adecuado para mecanismos de baja rigidez como la polea y la correa | No es adecuado para mecanismos de baja rigidez |
| La capacidad de respuesta es alta | La capacidad de respuesta es baja |
| Se utilizan para cargas fluctuantes | No se utilizan para cargas fluctuantes |
| No es necesario ajustar la ganancia/sintonía | Se requiere el ajuste de la ganancia/sintonía |
Motor paso a paso frente a motor de corriente continua
Tanto los motores paso a paso como los de corriente continua se utilizan en diferentes aplicaciones industriales, pero las principales diferencias entre estos dos motores son un poco confusas. Aquí enumeramos algunas características comunes entre estos dos diseños. Cada característica se discute a continuación.
|
Características |
Motor paso a paso |
Motor de CC |
| Características de control | Simple y utiliza un microcontrolador | Sencillo y sin necesidad de extras |
| Rango de velocidad | Baja de 200 a 2000 RPM | Moderado |
| Fiabilidad | Alta | Moderado |
| Eficiencia | Bajo | Alta |
| Características de par o velocidad | Mayor par a menos velocidades | Alto par a menos velocidades |
| Coste | Bajo | Bajo |
Parámetros del motor paso a paso
Los parámetros del motor paso a paso incluyen principalmente el ángulo de paso, los pasos por cada revolución, los pasos por cada segundo y las RPM.
Ángulo de paso
El ángulo de paso del motor paso a paso puede definirse como el ángulo al que gira el rotor del motor una vez que se da un solo impulso a la entrada del estator. La resolución del motor puede definirse como el número de pasos del motor y el número de revoluciones del rotor.
Resolución = Número de pasos/Número de revoluciones del rotor
La disposición del motor se puede decidir mediante el ángulo de paso y se expresa en grados. La resolución de un motor (el número de pasos) es el número de pasos que se dan en una sola revolución del rotor. Cuando el ángulo de paso del motor es pequeño, la resolución es alta para la disposición de este motor.
La exactitud de las disposiciones de los objetos a través de este motor depende principalmente de la resolución. Si la resolución es alta, la precisión será baja.
Algunos motores de precisión pueden crear 1000 pasos en una sola revolución, incluyendo 0,36 grados de ángulo de paso. Un motor típico incluye 1,8 grados de ángulo de paso con 200 pasos por cada revolución. Los diferentes ángulos de paso, como 15 grados, 45 grados y 90 grados, son muy comunes en los motores normales. El número de ángulos puede variar de dos a seis y se puede conseguir un ángulo de paso pequeño mediante piezas de polos ranurados.
Pasos para cada revolución
Los pasos para cada resolución pueden definirse como el número de ángulos de paso necesarios para una revolución total. La fórmula para ello es 360°/Ángulo de paso.
Pasos para cada segundo
Este tipo de parámetro se utiliza principalmente para medir el número de pasos recorridos en cada segundo.
Revoluciones por minuto
Las RPM son las revoluciones por minuto. Se utiliza para medir la frecuencia de las revoluciones. Así, utilizando este parámetro, podemos calcular el número de revoluciones en un minuto. La relación principal entre los parámetros del motor paso a paso es la siguiente
Pasos por cada segundo = Revoluciones por minuto x Pasos por revolución / 60
Interfaz del motor paso a paso con el microcontrolador 8051
La interconexión del motor paso a paso con el 8051 es muy sencilla, ya que se utilizan tres modos, como el accionamiento por ondas, el accionamiento por pasos completos y el accionamiento por medios pasos, dando el 0 y el 1 a los cuatro cables del motor, en función del modo de accionamiento que tengamos que elegir para hacer funcionar este motor.
Los dos hilos restantes deben acoplarse a una fuente de alimentación. Aquí se utiliza un motor paso a paso unipolar en el que los cuatro extremos de las bobinas se conectan a los cuatro pines primarios del puerto-2 del microcontrolador utilizando el ULN2003A.
Este microcontrolador no suministra suficiente corriente para accionar las bobinas, por lo que el CI conductor de corriente es el ULN2003A. Hay que utilizar el ULN2003A, que es un conjunto de 7 pares de transistores NPN Darlington. El diseño del par Darlington puede hacerse mediante dos transistores bipolares que se conectan para conseguir la máxima amplificación de la corriente.
En el CI controlador ULN2003A, los pines de entrada son 7, los de salida son 7, donde dos pines son para la alimentación y los terminales de tierra. Aquí se utilizan 4 pines de entrada y 4 de salida. Como alternativa al ULN2003A, también se utiliza el CI L293D para amplificar la corriente.
Debes observar con mucho cuidado los dos hilos comunes y los cuatro hilos de la bobina o el motor paso a paso no girará. Esto se puede observar midiendo la resistencia a través de un multímetro, pero el multímetro no mostrará ninguna lectura entre las dos fases de los cables. Una vez que el cable común y los otros dos cables están en la misma fase, deben mostrar una resistencia similar, mientras que los dos puntos finales de las bobinas en la misma fase mostrarán la doble resistencia en comparación con la resistencia entre el punto común y un punto final.
Solución de problemas
- La localización de averías es el proceso para comprobar el estado del motor si funciona o no. La siguiente lista de comprobación se utiliza para solucionar los problemas del motor paso a paso.
- En primer lugar, comprueba las conexiones y el código del circuito.
- Si está bien, comprueba a continuación que el motor recibe una alimentación de tensión adecuada o, de lo contrario, simplemente vibrará pero no girará.
- Si el suministro de tensión está bien, entonces comprueba los puntos finales de las cuatro bobinas que están aliadas al CI ULN2003A.
- Primero, descubre los dos extremos generales y fíjalos a la alimentación de 12v, después fija los cuatro cables restantes al CI ULN2003A. Hasta que el motor paso a paso se ponga en marcha, intenta todas las combinaciones posibles. Si la conexión no es correcta, el motor vibrará en lugar de girar.
¿Pueden funcionar continuamente los motores paso a paso?
Por lo general, todos los motores funcionan o giran de forma continua, pero la mayoría de los motores no pueden detenerse mientras están bajo tensión, cuando intentas restringir el eje de un motor cuando está bajo tensión, se quemará o romperá.
Por otra parte, los motores paso a paso están diseñados para dar un paso discreto, y luego esperar ahí; de nuevo dar un paso y quedarse ahí. Si queremos que el motor permanezca en un mismo lugar durante menos tiempo antes de volver a dar un paso, entonces parecerá que gira continuamente. El consumo de energía de estos motores es alto, pero la disipación de energía se produce principalmente cuando el motor está parado o está mal diseñado, entonces existe la posibilidad de que se sobrecaliente. Por esta razón, el suministro de corriente del motor se reduce con frecuencia una vez que el motor está en posición de espera durante un tiempo prolongado.
La razón principal es que, una vez que el motor está girando, su parte de potencia eléctrica de entrada puede cambiarse a potencia mecánica. Cuando el motor se detiene mientras está girando, toda la potencia de entrada puede convertirse en calor en el interior de la bobina.
Ventajas
El ventajas del motor paso a paso incluyen las siguientes.
- Robustez
- Construcción sencilla
- Puede funcionar en un sistema de control de bucle abierto
- El mantenimiento es bajo
- Funciona en cualquier situación
- La fiabilidad es alta
- El ángulo de rotación del motor es proporcional al impulso de entrada.
- El motor tiene el par máximo en estado de reposo.
- Posicionamiento preciso y repetibilidad del movimiento, ya que los buenos motores paso a paso tienen una precisión del 3 - 5% de un paso y este error no es acumulativo de un paso a otro.
- Excelente respuesta al arranque, la parada y la marcha atrás.
- Muy fiable, ya que no hay escobillas de contacto en el motor. Por tanto, la vida del motor depende simplemente de la vida del rodamiento.
- La respuesta del motor a los impulsos digitales de entrada proporciona un control en bucle abierto, lo que hace que el motor sea más sencillo y menos costoso de controlar.
- Es posible conseguir una rotación sincrónica de muy baja velocidad con una carga directamente acoplada al eje.
- Se puede realizar una amplia gama de velocidades de rotación, ya que la velocidad es proporcional a la frecuencia de los impulsos de entrada.
Desventajas
El desventajas del motor paso a paso incluyen las siguientes.
- La eficiencia es baja
- El par de un motor disminuye rápidamente con la velocidad
- La precisión es baja
- La retroalimentación no se utiliza para especificar los posibles pasos perdidos
- Par pequeño hacia la relación de inercia
- Extremadamente ruidoso
- Si el motor no está bien controlado, pueden producirse resonancias
- El funcionamiento de este motor no es fácil a velocidades muy altas.
- Es necesario un circuito de control específico
- En comparación con los motores de corriente continua, utiliza más corriente
Aplicaciones
El aplicaciones del motor paso a paso incluyen las siguientes.
- Máquinas industriales - Los motores paso a paso se utilizan en los calibres de los automóviles y en los equipos de producción automatizada de las máquinas herramienta.
- Seguridad - nuevos productos de vigilancia para la industria de la seguridad
- Médico - Los motores paso a paso se utilizan dentro de escáneres médicos, tomadores de muestras, y también se encuentran dentro de la fotografía dental digital, bombas de fluidos, respiradores y maquinaria de análisis de sangre.
- Electrónica de consumo - Motores paso a paso en las cámaras para las funciones de enfoque y zoom automáticos de las cámaras digitales.
Y también tienen aplicaciones en máquinas comerciales, aplicaciones en periféricos de ordenador.
Por tanto, se trata de una visión general del motor paso a paso como la construcción, el principio de funcionamiento, las diferencias, las ventajas, los inconvenientes y sus aplicaciones. Ahora ya tienes una idea sobre los tipos de supermotores y sus aplicaciones, si tienes alguna duda sobre este tema o sobre los proyectos eléctricos y electrónicos deja los comentarios a continuación.
Crédito de la foto
Si quieres conocer otros artículos parecidos a Qué es un motor paso a paso : Tipos y su funcionamiento puedes visitar la categoría Generalidades.
Deja una respuesta
¡Más Contenido!