
Motor de corriente continua sin escobillas - Ventajas, aplicaciones y control
Definición
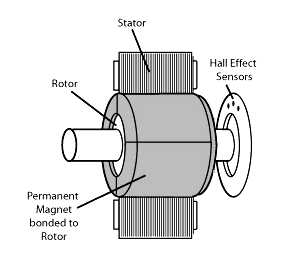
Un motor de corriente continua sin escobillas está formado por un rotor en forma de imán permanente y un estator en forma de bobinado polifásico. Se diferencia del motor de corriente continua convencional en que no contiene escobillas y la conmutación se realiza de forma eléctrica, utilizando un accionamiento electrónico para alimentar los devanados del estator.
Básicamente, un motor BLDC puede construirse de dos maneras: colocando el rotor fuera del núcleo y los devanados en el núcleo y otra colocando los devanados fuera del núcleo. En la primera disposición, los imanes del rotor actúan como aislantes y reducen la tasa de disipación de calor del motor y funcionan a baja corriente. Se suele utilizar en los ventiladores. En la segunda disposición, el motor disipa más calor, lo que provoca un aumento de su par. Se utiliza en las unidades de disco duro.
funcionamiento del motor bifásico de 4 polos
El motor de corriente continua sin escobillas es accionado por un controlador electrónico que conmuta la tensión de alimentación entre los devanados del estator a medida que el rotor gira. La posición del rotor es controlada por el transductor (óptico o magnético) que suministra información al controlador electrónico y, en función de esta posición, se determina el devanado del estator que debe ser energizado. Este accionamiento electrónico consta de transistores (2 por cada fase) que se accionan mediante un microprocesador.

El campo magnético generado por los imanes permanentes interactúa con el campo inducido por la corriente en los devanados del estator, creando un par mecánico. El circuito electrónico de conmutación o el accionamiento conmuta la corriente de alimentación al estator para mantener un ángulo constante de 0 a 90 grados entre los campos que interactúan. Los sensores Hall se montan principalmente en el estator o en el rotor. Cuando el rotor pasa por el sensor Hall, en función del polo norte o sur, genera una señal alta o baja. En función de la combinación de estas señales, se define el devanado que debe recibir energía. Para que el motor siga funcionando, el campo magnético producido por los devanados debe cambiar de posición, ya que el rotor se mueve para alcanzar el campo del estator.
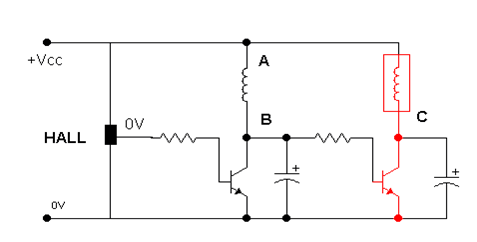
En un motor de corriente continua sin escobillas de 4 polos y 2 fases, se utiliza un único sensor Hall, que está incrustado en el estator. Cuando el rotor gira, el sensor Hall detecta la posición y desarrolla una señal alta o baja, según el polo del imán (Norte o Sur). El sensor Hall está conectado mediante una resistencia a los transistores. Cuando se produce una señal de alta tensión en la salida del sensor, el transistor conectado a la bobina A comienza a conducir, proporcionando el camino para que fluya la corriente y, por tanto, energizando la bobina A. El condensador comienza a cargarse hasta la tensión de alimentación completa. Cuando el sensor Hall detecta un cambio de polaridad del rotor, desarrolla una señal de baja tensión en su salida y, como el transistor 1 no recibe ninguna alimentación, está en condición de corte. La tensión desarrollada alrededor del condensador es Vcc, que es la tensión de alimentación del transistor 2nd transistor, y la bobina B está ahora energizada, ya que la corriente pasa por ella.
Los motores BLDC tienen imanes permanentes fijos que giran y un inducido fijo, lo que elimina los problemas de conexión de la corriente al inducido móvil. Y posiblemente tengan más polos en el rotor que el estator o los motores de reluctancia. Estos últimos pueden carecer de imanes permanentes, sólo de polos que se inducen en el rotor y luego son arrastrados por los devanados del estator temporizados. Un controlador electrónico sustituye al conjunto escobilla/comutador del motor de corriente continua con escobillas, que conmuta continuamente la fase a los devanados para mantener el motor girando. El controlador realiza la distribución comparativa de potencia temporizada utilizando un circuito de estado sólido en lugar del sistema de escobillas/comutadores.
7 Ventajas de los motores de corriente continua sin escobillas
- Mejores características de velocidad frente a par
- Alta respuesta dinámica
- Alta eficiencia
- Larga vida útil gracias a la ausencia de pérdidas eléctricas y de fricción
- Funcionamiento silencioso
- Rangos de velocidad más altos
Aplicaciones:
El coste del Motor de CC sin escobillas ha disminuido desde su presentación, debido a los avances en los materiales y el diseño. Esta disminución del coste, junto con los numerosos puntos de interés que tiene sobre el motor de CC de escobillas, hace que el motor de CC sin escobillas sea un componente popular en numerosas aplicaciones distintas. Las aplicaciones que utilizan el motor BLDC incluyen, aunque no se limitan a:
- Electrónica de consumo
- Transporte
- Calefacción y ventilación
- Ingeniería industrial
- Ingeniería de modelos
Principio de funcionamiento
Los principios de funcionamiento de los motores BLDC son los mismos que los de un motor de CC con escobillas, es decir, la retroalimentación de la posición del eje interno. En el caso de un motor de CC con escobillas, la retroalimentación se realiza mediante un conmutador mecánico y escobillas. En el motor BLDC, se consigue utilizando varios sensores de retroalimentación. En los motores BLDC se utiliza sobre todo un sensor de efecto Hall, siempre que los polos magnéticos del rotor pasan cerca del sensor Hall, generan una señal de nivel ALTO o BAJO, que puede utilizarse para determinar la posición del eje. Si la dirección del campo magnético se invierte, la tensión desarrollada también se invertirá.
Control de un motor BLDC
La unidad de control se implementa mediante microelectrónica tiene varias opciones de alta tecnología. Puede implementarse mediante un microcontrolador, un microcontrolador dedicado, una unidad microelectrónica cableada, un PLC u otra unidad similar.
El controlador analógico se sigue utilizando, pero no puede procesar los mensajes de retroalimentación y controlar en consecuencia. Con este tipo de circuitos de control, es posible implementar algoritmos de control de alto rendimiento, como el control vectorial, el control orientado al campo, el control de alta velocidad, todos ellos relacionados con el estado electromagnético del motor. Además, el control de bucle exterior para diversos requisitos dinámicos, como los controles de motores deslizantes, el control adaptativo, el control predictivo... etc., también se implementan de forma convencional.
Además de todo esto, encontramos PIC (Circuito Integrado de Potencia) de alto rendimiento, ASIC (Circuitos Integrados de Aplicación Específica)...etc. que pueden simplificar mucho la construcción del control y de la unidad electrónica de potencia. Por ejemplo, hoy en día tenemos un regulador PWM (Pulse Width Modulation) completo en un solo CI que puede sustituir a toda la unidad de control en algunos sistemas. El CI conductor compuesto puede proporcionar la solución completa de accionar los seis interruptores de potencia en un convertidor trifásico. Hay numerosos circuitos integrados similares, y cada día se añaden más. Al final, el montaje del sistema posiblemente sólo implique una pieza de software de control con todo el hardware en la forma adecuada.
Para controlar la velocidad del motor se puede utilizar la onda PWM (Pulse Width Modulation). Aquí se da la tensión media o la corriente media que fluye por el motor cambiará en función del tiempo de encendido y apagado de los pulsos que controlan la velocidad del motor, es decir, el ciclo de trabajo de la onda controla su velocidad. Al cambiar el ciclo de trabajo (tiempo de ON), podemos cambiar la velocidad. Al intercambiar los puertos de salida, cambiará efectivamente la dirección del motor.
Control de velocidad
El control de la velocidad del motor BLDC es esencial para que el motor funcione al ritmo deseado. La velocidad de un motor de corriente continua sin escobillas puede controlarse mediante el control de la tensión continua de entrada. Cuanto mayor sea la tensión, mayor será la velocidad. Cuando el motor funciona en modo normal o por debajo de la velocidad nominal, la tensión de entrada del inducido se modifica mediante el modelo PWM. Cuando el motor funciona por encima de la velocidad nominal, el flujo se debilita mediante el avance de la corriente de salida.
El control de la velocidad puede ser de bucle cerrado o de bucle abierto.
Control de velocidad en bucle abierto: consiste simplemente en controlar la tensión de corriente continua aplicada a los terminales del motor cortando la tensión de corriente continua. Sin embargo, esto da lugar a alguna forma de limitación de la corriente.
Control de velocidad en bucle cerrado - Implica el control de la tensión de alimentación de entrada a través de la retroalimentación de la velocidad del motor. Así, la tensión de alimentación se controla en función de la señal de error.
El control de velocidad en bucle cerrado consta de tres componentes básicos.
- Un circuito PWM para generar los pulsos PWM necesarios. Puede ser un microcontrolador o un CI temporizador.
- Un dispositivo sensor para detectar la velocidad real del motor. Puede ser un sensor de efecto Hall, un sensor de infrarrojos o un codificador óptico.
- Un accionamiento del motor para controlar su funcionamiento.
Esta técnica de modificación de la tensión de alimentación en función de la señal de error puede realizarse mediante la técnica de control pid o utilizando la lógica difusa.
Aplicación al control de velocidad de un motor de corriente continua sin escobillas
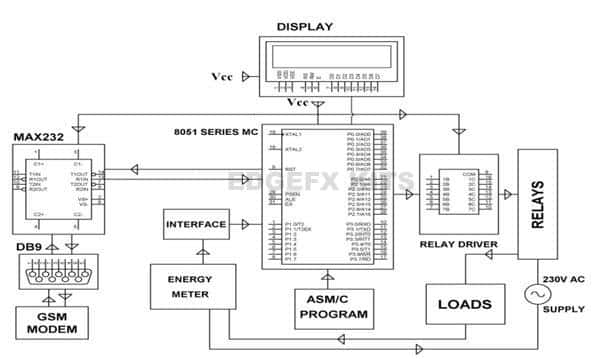
El funcionamiento del motor se controla mediante un optoacoplador y una disposición de MOSFET, donde la potencia de CC de entrada se controla mediante la técnica PWM desde el microcontrolador. Cuando el motor gira, el led infrarrojo presente en su eje se ilumina con luz blanca debido a la presencia de un punto blanco en su eje y refleja la luz infrarroja. El fotodiodo recibe esta luz infrarroja y experimenta un cambio en su resistencia, lo que provoca un cambio en la tensión de alimentación del transistor conectado y se da un impulso al microcontrolador para generar el número de rotaciones por minuto. Esta velocidad se muestra en la pantalla LCD.
La velocidad requerida se introduce en el teclado interconectado al microcontrolador. La diferencia entre la velocidad detectada y la velocidad deseada es la señal de error y el microcontrolador genera la señal PWM según la señal de error, basándose en la lógica difusa para dar la entrada de potencia en cc al motor.
Así, mediante el control en bucle cerrado, se puede controlar la velocidad del motor de corriente continua sin escobillas y hacer que gire a la velocidad deseada.
Crédito de la foto:
Si quieres conocer otros artículos parecidos a Motor de corriente continua sin escobillas - Ventajas, aplicaciones y control puedes visitar la categoría Generalidades.
Deja una respuesta
¡Más Contenido!